你能用篮球砸中3米外悬停的无人机吗?很多人或许觉得这并非难事,但今天介绍的这台无人机可能会颠覆你的自信——它能在你抛出球的瞬间,灵活而迅速地完成躲避。
瑞士苏黎世大学的一支研究团队,近期设计出一套创新方法,让无人机能够在主动闪避移动障碍物的同时,保持快速导航。这项成果的重要意义在于,它推动无人机在恶劣环境中更快飞行,并能更高效地在更短时间内完成更多任务。
图 | 成功躲避球的无人机(来源:Da vide Scaramuzza)
先介绍背景。虽然市面上的无人机已能胜任多种任务,但躲避障碍物并非其强项,尤其在高速移动状态下。许多飞行机器人虽配备摄像头用于检测障碍,但从图像处理到作出反应通常需要20至40毫秒。这个时间看似短暂,但当无人机高速飞行时,20到40毫秒的反应窗口根本不足以避开飞鸟、另一架无人机,甚至静态障碍物。尤其是在不可预测的环境中飞行,或多架无人机在同一空域协同作业时,问题会变得更为棘手。
苏黎世大学的研究人员将一种类似运动传感器的“事件摄像头”整合到系统中,并设计了全新算法,将无人机的反应时间压缩至几毫秒——没错,直接提升了一个数量级。这一突破足以让无人机在空中躲避短距离砸来的球或类似物体。相关研究成果已发表在最新一期的《科学·机器人》杂志上,由苏黎世大学机器人技术与感知方向教授Da vide Scaramuzza主导。
新型摄像头与算法结合,3.5毫秒快速反应
传统摄像头(例如手机上的那种)工作原理很简单:定期拍摄一张“快照”,整幅画面所有像素同时曝光,然后交给计算机逐帧分析。这样一来,只有等机载计算机把全部像素分析完毕,才能检测到运动物体。而Da vide团队研发的“事件摄像头”则截然不同——它拥有独立工作的智能像素。也就是说,只有当某个像素感知到光强度变化时,它才会立即发出信号;没有变化的像素保持沉默。这样,机载计算机只需处理画面中一小部分发生变化的像素,计算速度显著提升,反应时间也随之缩短。
具体而言,Da vide解释道:事件会在时空域中生成一个“体”。他们的算法只考虑过去10毫秒内出现的事件,先补偿摄像头自身的运动,再分析所有事件的统计数据。对于每个像素,他们计算归一化的平均时间戳,范围在-1到1之间,动态对象的得分非常接近1。这样一来,就可以通过阈值将静态对象与动态对象区分开来。
图 | 自我运动补偿算法的各个阶段,以便区分出属于移动障碍的事件(来源:Da vide Scaramuzza)
还需说明一个问题:目前市面上无人机的目标检测算法,很难与这种新型摄像头配合工作。因为“事件摄像头”是近年才兴起的新技术,其输出方式与传统摄像头完全不同——它不输出恒定时间间隔的标准图像,而是输出与每个像素强度变化对应的异步事件流。因此,研究人员必须自行开发算法,在极短时间内收集所有事件记录,再减去无人机自身运动所产生的影响。
Da vide提到,目前全球只有5家公司能够生产这种“事件摄像头”。他的团队使用的是Insightness公司的设备。至于无人机平台,则是实验室定制的四轴飞行器,与市售产品差别不大,但用于感知和导航的算法全部由团队自主研发。
研究过程中,他们首先分别测试了摄像头和算法。第一步,将摄像头单独静止放置,向它投掷各种形状和大小的物体,同时测量算法检测物体的效率。结果显示,根据物体大小和投掷距离的不同,检测成功率在81%到97%之间浮动。而且,这套系统从检测到来袭物体到做出反应,平均只需3.5毫秒。
接下来是最严酷的考验:将摄像头安装到真实的无人机上,在室内和室外分别飞行,然后直接向无人机投掷物体。经过反复测试,无人机成功避开物体的概率超过了90%。其中包括从3米远处、以每秒10米的速度扔出的球。当无人机提前知道物体大小时,仅需一台“事件摄像头”即可;而面对大小不一的物体时,则需要两个摄像头提供立体视觉。
正在接洽商业化
那么,这项技术能否在短期内实现规模化应用?Da vide给出的回答是:原则上,技术已做好商业化准备,团队正在与多家公司洽谈具体细节。
至于未来方向,他们计划在更灵活的四旋翼上测试这套系统。更长远的目标,是希望有朝一日能让无人机达到人类飞行员般的驾驶自如。目前,所有涉及无人机的搜索和救援任务实际上都需要人工控制。如果无人机能具备像人类飞行员一样可靠的导航能力,就可以投入到超视线范围或无法远程控制的任务中去。
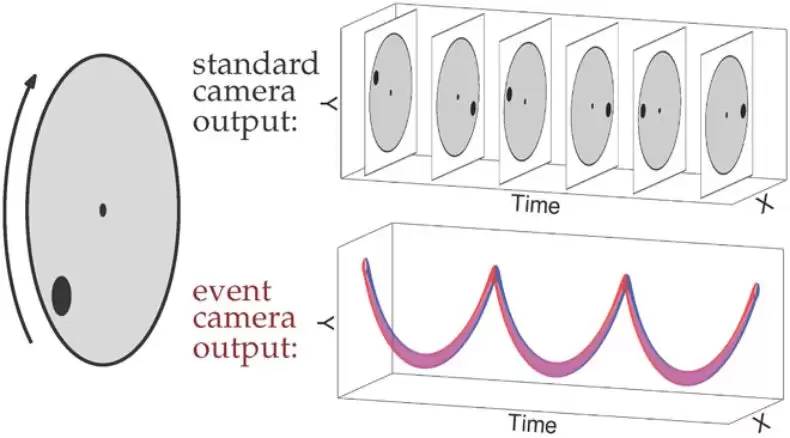
图 " 比较传统摄像头与事件摄像头的输出:传统摄像头以固定的速率捕获帧;而事件摄像头仅以时空事件的螺旋形式,连续输出亮度变化的信号,红色为正向变化,蓝色为负向变化(来源:Da vide Scaramuzza)
Da vide所在的苏黎世大学机器人与感知小组,一直专注于开发能够帮助自动无人机快速飞行的新技术,以便执行对时间要求极其严格的任务,例如自然灾害发生后对恶劣环境进行探索。比如地震、海啸后的搜救工作,时间就是生命。在有限的电量内(通常只有10到20分钟),无人机飞得越快、完成的任务越多越好。新摄像头将导航速度提升十倍左右,自然扩展了其潜在的更多应用场景。
未来总有一天,无人机会投入货物交付、人员运输、航拍摄影乃至搜救等各个领域。但让机器人更快地感知、更快地决策,对于更广泛的领域同样意味着改变游戏规则——无人驾驶汽车、运输机器人、采矿机器人以及远程检测设备等,都需要可靠地检测视野内的障碍物。个人认为,这项研究向着未来无人机或汽车更智能、更安全的方向,迈出了扎实的一小步。