在机器人触觉感知领域,长期存在一个核心难题:如何将各种不同类型的触觉传感器——如指尖传感器、皮肤传感器——高效集成到一只机器人手上,并通过统一接口完成数据传输。针对这一挑战,Meta AI 与 Wonik Robotics 联合给出了一个解决方案,即名为 Digit Plexus 的标准化软硬件平台。
简而言之,Digit Plexus 相当于机器人手的“触觉中枢”。它允许开发者将 Digit、Digit 360、ReSkin 等触觉传感器组合到同一只手中,仅需一根电缆即可将触觉数据编码并发送至主机,实现无缝的数据采集、控制与分析。这意味着以往需要为每种传感器单独布线和编写驱动程序的工作,如今被大幅简化了。
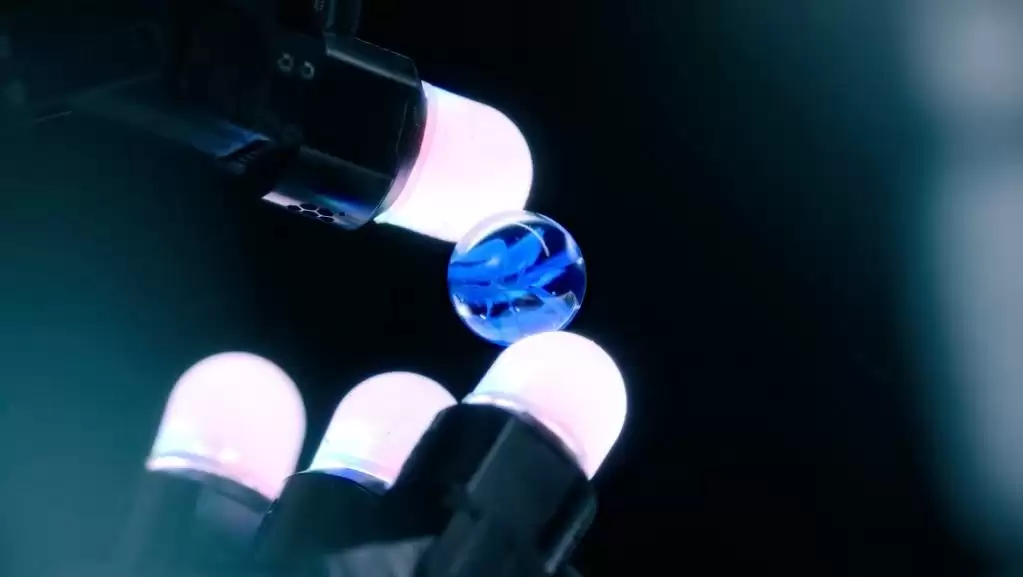
图片来源:Techcrunch
值得关注的是,Meta 与 Wonik 的合作并不仅限于平台本身。下一步,双方计划共同开发 Wonik 的新一代 Allegro Hand——一款搭载 Digit 360 等触觉传感器的机器人手,整套系统将在 Digit Plexus 平台上运行。换句话说,未来我们有望看到一只既能轻柔抓取鸡蛋而不捏碎,又能敏锐感知物体材质细微差异的机器人手。

图片来源:XELA
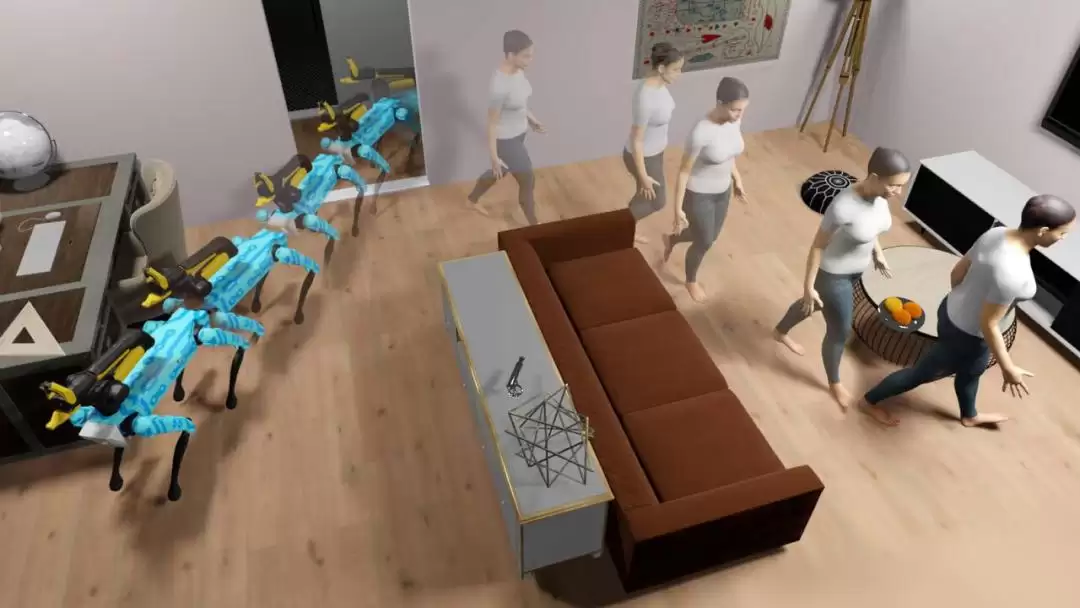
触觉只是机器人感知能力的一个环节。为了研究人机协作在家庭场景中的实际表现,Meta 在 Habitat 3.0 模拟平台的基础上推出了一项新基准——PARTNR。这绝非小项目:它包含了 10 万个自然语言任务,覆盖 60 栋虚拟房屋和 5800 多个独一无二的物体。乍看之下数字惊人,但背后的逻辑十分清晰——要想让机器人在人类家中帮忙收拾桌子、递送物品、开关冰箱,它必须先学会理解“把那个红色的杯子放到厨房台面上”这类指令,并与人类默契配合。
图片来源:LinkedIn
PARTNR 的目标正是评估大型语言模型和视觉模型(LLM / VLM)通过人机交互工具与人类协作的真实性能。Meta 表示,希望通过这个标准化基准“让机器人的研究不再只是独立运行,而是能够围绕人类运行——更高效、更可靠,并且适应每个人的喜好”。
让机器人拥有“触觉”,其实并非空中楼阁。从数据来看,这些传感器对外界变化的敏感度已经远超人类,配合高效的软硬件系统,未来在外科手术、精密仪器制造等场景中大有用武之地。而且,触觉之外的其他感官也在快速跟上:宾夕法尼亚州立大学的研究人员已经用 AI 模型模拟出了“味觉”,一家名为 Osmo 的公司甚至教会了 AI 如何模仿比人类更灵敏的“嗅觉”。
也许有一天,机器人能在感官层面完全“复刻”人类。不过话说回来,它们最好别同时长着一副逼真的“人形”——否则,恐怖谷效应真要犯了。




