世界模型详解:从核心概念到落地实践的全方位指南
2026年6月,智源大会掀起了全球AI领域对下一代人工智能——世界模型(World Model)的深度探讨。究竟什么是世界模型?它能带来哪些变革?不同技术路线各有哪些局限?本文基于智源研究院的最新研究成果,为你系统梳理、深入解读,呈现一份清晰、专业、完整的实用教程。
一、世界模型的本质是什么?——四大分类帮你厘清概念
在智源大会上,研究院明确了世界模型的分类标准,帮助行业从业者拨开迷雾、正本清源:
- 第一类:以语言为中心(VLM、VLA)——在文本空间中预测下一个词,学到的是“语言所描述的世界”,无法理解物理后果与因果关系。
- 第二类:以像素为中心(Sora、Seedance等)——在视觉空间中学习视频与图像,学到的是“像素所呈现的世界”。
- 第三类:以三维结构为中心(3D重建、World Labs Marble)——重建三维空间,但几何结构≠物理状态,二者有本质区别。
- 第四类:以视觉表征为中心(JEPA系列)——预测视觉表征的压缩表示,但视觉嵌入的演化并不等同于物理规律的演化。
这四大分类解释了为何视频公司、3D建模企业乃至游戏引擎开发商都能贴上“世界模型”的标签。边界模糊带来了巨大的想象空间,但同时也引发了大量的概念混淆与理解偏差。
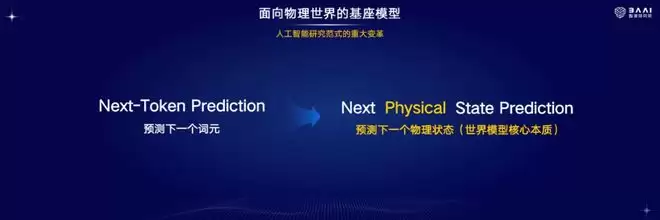
二、世界模型的核心定义:预测下一物理状态
智源研究院院长王仲远指出:世界模型以“预测下一物理状态”为根本核心。“物理状态”涵盖语言、动作、时间、空间等多维度信息,是面向真实物理世界的下一代基座模型。
一个真正意义上的世界模型必须同时具备三大能力:
- 感知、理解与推理真实的物理状态和物理常识
- 覆盖全模态数据:包括文本、视频、深度信息、力觉数据、感知信号等
- 主动交互能力:能够支撑各类物理世界的下游应用场景
三、技术路线探索:潜空间融合——未来可行的方向
智源认为,未来可能出现第五种分类:以语言为中心与以视觉表征为中心的融合,即潜空间表征(Latent Space Representation)。同一个潜空间可以解码出不同的模态信息。
智源推出的悟界·Emu3.5模型正是将文字、图像、视频等多种模态原生压缩至统一的语义空间。王仲远表示:“统一的潜空间建模(全模态潜空间)很可能是世界模型真正的下一个技术路径。”
四、最新成果发布:两款世界模型正式亮相
悟界·Physis-v0.1 —— 全球首款通用世界基座模型
- 采用物理隐空间表征替代传统的像素级或帧级预测方式
- 实现跨场景通用的物理规律强化学习机制
- 搭载专属物理状态编码器,完成视频、深度RGB、3D点云、力触反馈等全模态信息的统一压缩
- 弥补了AI“不理解真实物理规则、推演可信度偏低、长程时序记忆缺失”的核心短板
- 可广泛应用于工业仿真、具身智能、物理模拟、科学研究等严肃场景
悟界·RoboBrain Orca —— 具身大脑
- 以下一物理状态预测为驱动核心
- 构建了“统一表征—统一建模—统一预测—统一交互”的完整闭环
- 从Next Token/Frame/Action Prediction升级为Next Physical State Prediction
- 融合大量Ego-centric交互数据,显著提升少样本学习与跨场景泛化能力
- 已成功支撑物流、酒店服务等真实环境中的长期自主作业任务
五、具身智能面临的考验:数据、路线、算力三大难题
1. 数据匮乏
真实世界数据分散在不同的信息孤岛中。虽然视频数据量巨大,但其有效性存在广泛争议——视频是否足以揭示物理因果关系?王仲远认为视频数据目前仍未被充分挖掘利用,但仅靠视频远远不够,必须持续采集真实世界的物理数据。智源正在尝试与高校、企业合作,同时设计更轻量级的数据采集设备以降低成本。
2. 技术路线之争:世界模型 vs VLA
VLA(Vision-Language-Action)在工业分拣等场景已有落地应用,但也暴露出泛化性差、缺乏物理常识、主动探索能力不足、部署延迟较高等明显局限。王仲远直言:“VLA是当下的解决方案,世界模型才是未来的方向。”
一个共性难题是:如何将物理规律有效教给模型?例如,一瓶水与一瓶咖啡从桌边跌落,其物理状态完全不同——人类可以凭借世界模型准确预测,但当前AI缺乏对时间、空间、物理规律的全模态常识理解。
3. 算力消耗
不同技术路线的算力需求差异较大。智源的悟界·Physis通过潜空间建模、极致压缩,以及不同任务使用不同Decoder的方式,有效降低了算力消耗。王仲远表示,LLM时期建成的算力基础设施大多可以复用(如训练框架、工具链等),但后续具体场景可能会催生新的算力需求。
六、市场启示:模糊的正确远比精确的混乱更有价值
回顾历史:互联网泡沫之后亚马逊、谷歌崛起;云计算泡沫之后AWS、Azure胜出;区块链泡沫之后核心价值在金融、供应链等领域得以保留。当前世界模型的“模糊”状态正在吸引大量资本涌入——过去18个月全球超100亿美元流入世界模型与机器人AI领域,国内截至2026年6月已披露超75亿元。
王仲远总结道:“技术创新需要先行,最终必须依靠具体场景的系统或产品来证明物理可验证、长时序推理、因果逻辑推断等技术目标能够真正落地。” 智源作为科研机构,承担原始创新的责任,也不排除未来发现当前认知存在偏差——这正是科研的魅力所在。
常见问题解答(FAQ)
Q1:世界模型和VLA模型究竟有何区别?
A: VLA(Vision-Language-Action)模型在特定任务(如工业分拣)中表现尚可,但其本质是“语言+视觉+动作”的简单拼接,缺乏对物理因果的深层理解,泛化能力较差。而世界模型以预测下一物理状态为核心,具备理解物理规律和跨场景推理的能力。当前业界共识是:VLA属于短期方案,世界模型才是长期演进方向。
Q2:为什么说视频数据的“有效性”存在争议?
A: 视频数据虽然数量庞大,但仅记录了像素变化,无法直接揭示背后的物理原因(例如一个球掉落是由于重力作用)。部分专家认为视频只提供表面视觉信息,不能用于训练真正的物理理解;另一部分人则认为通过海量视频可以隐式学习物理规律。智源的观点是视频数据仍未被充分利用,但必须配合真实物理数据才能取得突破。
Q3:训练世界模型需要多少算力?
A: 取决于所采用的技术路线。如果使用类似LLM的生成式方法,算力需求会非常巨大;如果采用潜空间压缩、隐空间学习等极致压缩方法,则可以大幅降低算力。智源的悟界·Physics通过潜空间建模,不同任务使用不同Decoder,减少了重复计算。此外,LLM时期积累的算力基础设施(如训练框架、集群)大多可以直接复用。
小贴士
- ★ 区分世界模型的四大类别:在阅读相关论文或评估产品时,首先判断它属于哪一类(语言/像素/3D结构/视觉表征),避免概念混淆。
- ★ 密切关注“潜空间”技术:智源认为全模态潜空间可能是世界模型的真正路径,这一方向值得持续跟踪研究。
- ★ 尽早布局数据采集:真实物理世界数据目前极度匮乏,有意向的团队应提前与高校、企业合作积累传感器数据、力觉数据等关键资源。
- ★ 切勿神化世界模型:当前任何标榜“世界模型”的产品都需要严格验证其物理预测能力,警惕概念炒作与过度营销。
结语
世界模型正处在“概念火热、技术初期”的关键发展阶段。从智源大会的清晰分类,到悟界系列产品的实际落地,我们能看到一条从“生成内容”走向“理解与预测物理世界”的可行路径。尽管数据、技术路线、算力等方面仍面临重重挑战,但正如历史反复证明的——一个模糊但足够宏大的愿景,往往能孕育出下一个时代的技术地基。对于从业者而言,准确理解技术本质、保持开放探索的心态,比急于贴上“世界模型”的标签更为重要。