刚刚落幕的ICRA 2026(机器人领域顶级国际会议)上,自动化方向的最佳论文奖被一支中国研究团队成功斩获。获奖成果名为IMR-LLM,由深圳大学胡瑞珍教授团队、中科院工业人工智能研究所徐凯研究员团队,联合视比特机器人与卡尔顿大学共同完成。核心贡献十分明确:构建并验证了一个面向工业产线的多机器人协同任务规划与可执行程序自动生成框架。

通俗地讲,这套系统能够让大语言模型直接理解自然语言指令,进而为工厂中的多台机器人生成调度策略与底层控制代码。过去产线切换任务时,工程师必须手动重写整套逻辑与程序;如今只需输入一句中文描述,系统就能自动输出完整的任务分配方案和可直接部署运行的代码。
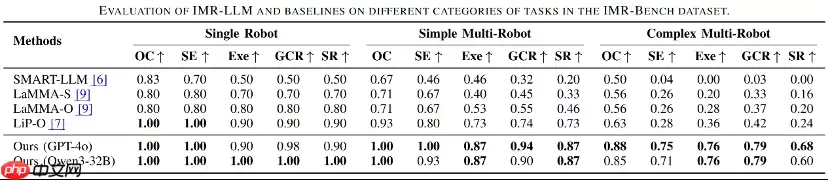
在涵盖23个真实工业场景、50项制造任务的IMR-Bench基准测试中,IMR-LLM在任务规划质量、程序生成准确性以及端到端任务成功率这三项关键指标上,均显著超越了当前主流方法。并且任务越复杂,其性能优势就越发突出。
那么,它究竟是如何实现的?
研究动因
现代柔性制造产线普遍依赖多个异构机器人协同作业。但现实问题是,目前绝大多数任务调度仍然高度依赖人工经验——从工序拆解、资源分配到运动轨迹编程,都需要大量定制化开发。一旦工艺变更或设备增减,整套流程就得推倒重来,这严重制约了产线的响应速度与重构效率。
大语言模型在语义理解与推理方面展现出强大潜力,然而现有基于LLM的机器人控制系统多聚焦于家庭服务这类低约束环境,难以应对工业场景中严苛的时间窗口、空间干涉、资源独占及工序依赖等硬性限制。
正是基于上述痛点,研究团队提出了IMR-LLM框架:以大语言模型作为“认知中枢”,负责意图解析与高层任务分解;再通过结构化求解器与程序合成模块充当“执行引擎”,确保调度结果满足物理约束,程序具备可执行性与鲁棒性。实验结果表明,该方法不仅在多项量化指标上全面领先,还展现出优异的跨产线、跨任务迁移能力。
已有工作局限
当前主流方法大多针对结构简单、交互稀疏的家庭服务场景设计。这类场景的任务步骤间耦合度低、动作粒度粗、执行逻辑短,直接依赖大模型端到端生成规划与脚本勉强可行。
但工业制造环境截然不同:工件加工路径存在强时序依赖(比如热处理必须在机加之后),设备使用具有排他性(同一夹具不能同时服务两台机器人),程序长度动辄数百行、嵌套层级深、变量绑定严。如果只靠大模型自由生成,极易出现“幻觉式合理”——表面逻辑通顺,实际上违反了产线物理规则,导致死锁、碰撞或工序中断。
技术突破点
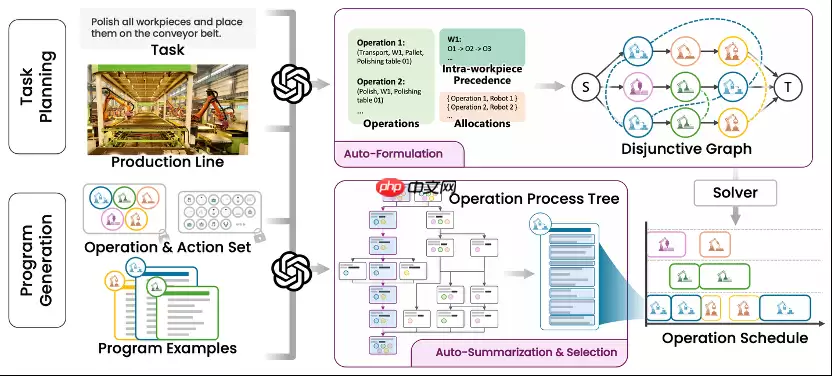
IMR-LLM采用“语义驱动+结构保障”的双阶段范式,分别攻克两大核心难题:“谁在何时做什么?”与“具体怎么执行?”。
在任务规划阶段,系统首先调用大语言模型对自然语言指令进行深度解析,识别目标工件、工艺类型、质量要求等语义要素,并将任务自动拆解为带依赖关系的工序链;随后完成机器人角色分配与工序排序,最终将非结构化描述转化为标准析取图(Disjunctive Graph)表示。这样一来,原本模糊的人类语言需求就被映射成一个形式化、可建模、可求解的车间调度问题。系统随即接入成熟优化求解器,在满足工艺顺序、设备容量、时间窗等多重硬约束条件下,输出最优或近优的时空调度方案。
在程序生成阶段,系统没有走“让大模型硬写长代码”的高风险路径,而是从历史优质程序样本中自动提炼高频动作模式(比如“抓取→定位→打磨→检测→放置”)、模块化控制结构(如循环分拣、异常跳转、多机器人同步等待)及环境适配接口(如不同夹爪通信协议),构建出一棵可扩展的工序流程树。面对新任务时,系统不再生成全新代码,而是依据当前机器人配置、传感器状态与产线拓扑,从流程树中匹配最合适的子路径,再动态注入参数与校验逻辑,拼装出安全、简洁、可验证的执行程序。这相当于把困难的长序列生成问题,降维成了可控的路径检索与组合问题,大幅缓解了模型幻觉风险。
实验验证
数据集构建
为了真实反映重型装备制造业的实际挑战,研究团队构建了IMR-Bench基准数据集。该数据集覆盖船舶分段焊接、风电塔筒装配、高铁转向架检测等23类典型工业现场,共包含50个制造任务,按工序数、机器人数量、约束密度划分为三级难度,单个任务最高含24道严格时序工序。
定量评估结果
论文将IMR-LLM与SOTA方法(包括纯LLM基线、传统调度器+人工编码、混合式规划框架)进行全面对比,从任务规划合理性(Task Plan Validity)、程序生成正确率(Program Correctness)、端到端任务成功率(End-to-End Success Rate)三个维度评测。结果显示:IMR-LLM在全部指标上稳居第一,而且在高难度任务中优势持续扩大。
定性分析案例
在仿真平台中,研究团队展示了该方法对任务变化与产线调整的强大适应力:
第一个演示视频中,机器人需对两类工件执行打磨并分类放置至指定托盘。IMR-LLM能够动态协调多机负载,避免空闲与拥堵,实现高效闭环。
当任务升级为协作打磨+分拣三种不同数量的工件时,系统自动识别数量最多的一类(高亮为紫色),将其分流至两条并行加工路径,显著压缩总节拍时间。
另一组实验里,任务保持不变,但产线布局重构、新增一台协作机器人。IMR-LLM可以即时感知资源配置变化,重新优化任务切分与路径规划,在新拓扑下仍保证全流程无冲突、零停机。
真实产线落地
研究团队还在多家合作企业的实际产线上完成了部署验证,涉及汽车焊装线、电池模组搬运站、航空结构件检测单元等多个场景。结果证实:该框架无需修改底层控制器,即可快速适配不同品牌机器人与MES系统,具备工程落地可行性。
总结与展望
这项工作提出了IMR-LLM——首个专为工业多机器人协同场景设计的语言模型驱动型任务规划与程序生成框架。其本质是“分工协作”:LLM专注语义理解与抽象推理,结构化工具承担约束建模与可执行性验证,二者形成互补闭环。
同时,研究团队首次发布了面向重工业的IMR-Bench评测基准,填补了该领域高质量开源数据集的空白。在仿真与真实产线双重验证下,IMR-LLM展现出远超现有方法的任务完成率与调度鲁棒性。
后续工作将重点引入执行反馈机制,构建“感知→推理→执行→诊断→修正”的实时闭环系统,提升算法在硬件突发故障、物料偏差、临时插单等动态扰动下的在线应变能力,加速大模型技术向更开放、更复杂、更安全的工业具身智能场景纵深演进。
论文标题:IMR-LLM: Industrial Multi-Robot Task Planning and Program Generation using Large Language Models
论文地址:https://www.php.cn/link/a201af0dc8f57ebbf253e6f8c0348480
项目主页:https://www.php.cn/link/66d8acbdb9f1cd14f322c69f9fb9a896