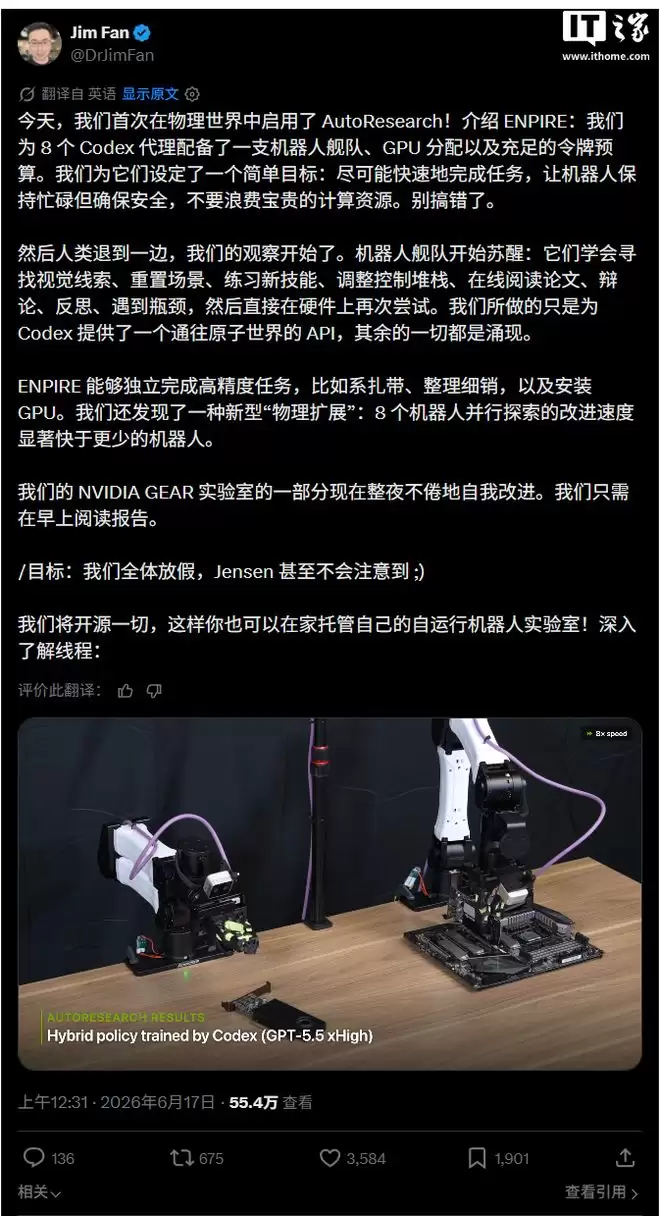
先来关注一项值得瞩目的突破——英伟达GEAR实验室的Jim Fan近日发布了一段视频,宣布首次在真实物理世界中成功启动了名为AutoResearch的自主研究系统。这套系统并非虚拟仿真实验,而是直接运行在真实机器人硬件上的实战项目。
支撑这一系统的核心框架名为ENPIRE,由GEAR实验室自主研发,是一种创新的编码智能体架构。其核心思路是将现实世界中的机器人学习过程,转化为一个具备自我管理和优化能力的可控流程。换言之,人工智能不再仅仅被动执行指令,而是能够主动掌控自己的学习与实验进程。

具体是如何操作的?研究团队为8个Codex智能体配置了多台机器人、GPU计算集群以及充足的Token预算,并设定了一个简洁明确的目标:在确保安全和算力高效利用的前提下,以最快速度完成任务,让机器人持续保持高效运作。其余所有决策与调度,全部交由系统自主执行。
令人惊叹的现象随即发生。这些机器人开始主动搜寻视觉线索、自动重置实验场景、练习新技能、调整控制参数栈,甚至在线阅读科研论文、展开内部辩论与自我反思——遇到瓶颈时,它们会直接在真实硬件上重新尝试。研究人员所做的,仅仅是提供了一个通向物理世界的API接口,除此以外的所有探索与学习行为,均由AI自主完成。
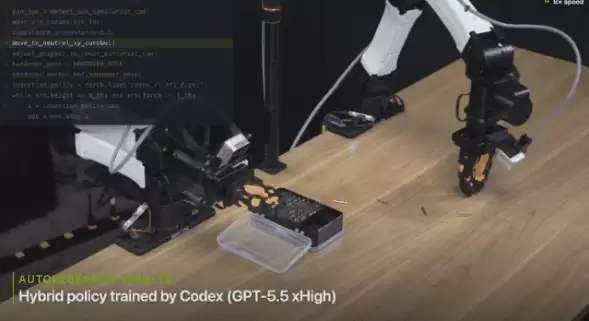
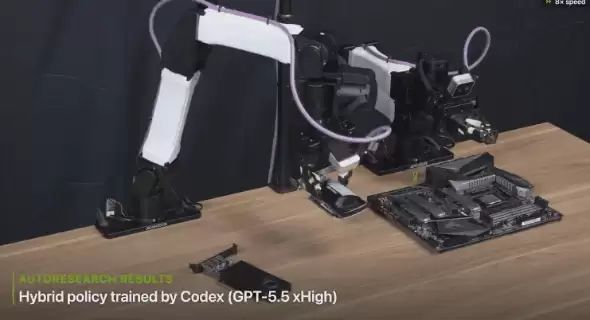
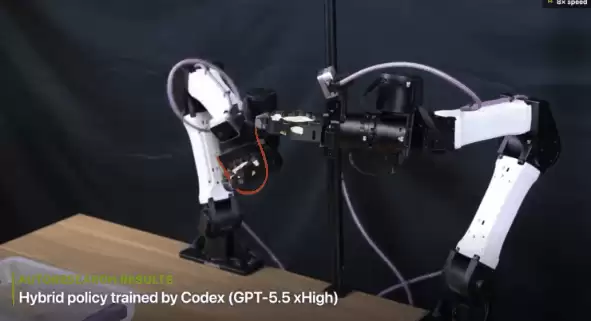

结果同样令人印象深刻。在ENPIRE框架的加持下,机器人能够独立完成高精度操作任务,例如系扎带、整理钉子,甚至将显卡精准插入主板——对机器人而言,这些操作绝非“小儿科”。
Jim Fan还透露了一个关键细节:机器人可以整夜不间断地进行自我优化,研究人员只需在第二天早上查阅训练报告即可。这有点像AI作为主力玩家,人类仅负责观看回放——但这次是在真实的物理世界中操作。
更引人瞩目的是,Jim Fan表示这项技术将开源。这意味着,具备相应条件的科技爱好者未来也有望在家中搭建属于自己的自动化机器人实验室。
ENPIRE论文链接:




