沃拉斯顿偏振器(Wollaston偏振棱镜),本质上是由两块双折射材料制成的棱镜,通过特殊光学胶合剂精密粘合而成。值得注意的是,寻常光(o光)与非寻常光(e光)出射时,相对入射光轴的偏折方向几乎呈对称分布。正因如此,沃拉斯顿偏振分束器的光束分离角度,通常可以达到同类罗雄偏振器的两倍左右。本文将重点介绍采用氟化镁(MgF₂)晶体的沃拉斯顿偏振棱镜。
一、基础结构与设计原理
想要透彻理解沃拉斯顿偏振棱镜的工作机制,首先需要掌握几个关键核心要素。
1. 晶体属性
MgF₂作为正单轴晶体,其透光波段横跨110至7000纳米,这意味着它能够覆盖从深紫外到中红外的广阔光谱范围,光学性能十分全面。
2. 结构构成
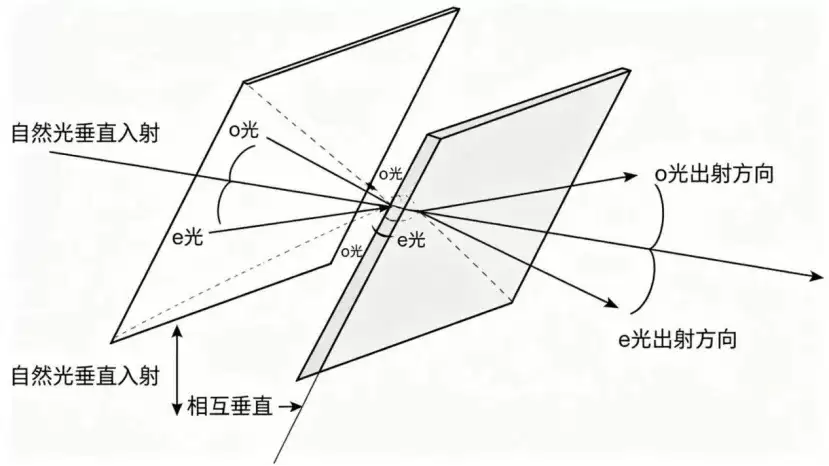
沃拉斯顿偏振棱镜的结构设计非常精巧:两块尺寸完全一致的直角MgF₂棱镜,光轴方向彼此垂直,斜面通过光胶工艺紧密贴合。当自然光垂直入射至端面时,分光过程便由此启动。
3. 分光原理
分光过程可以归纳为三个关键步骤:首先,入射光进入第一块棱镜后,被分解为o光和e光,此时两束光仍沿相同路径传播。紧接着,在两块棱镜的界面处,两束光的偏振状态发生互换,折射率随即产生突变。最后,这两束正交偏振光分别向两侧偏折,射出棱镜后完全分离,形成稳定的分光效果。
一个重要的区别在于,与洛匈棱镜相比,沃拉斯顿偏振器的两束出射光均会偏离入射光轴,这是其独特的光路特征。
4. 核心分离角公式
分离角的大小主要由棱镜顶角决定。简单来说,棱镜顶角越大,或入射光波长越短,分光夹角就相应增大。
二、关键设计参数
1. 工作波段
沃拉斯顿偏振棱镜的核心应用领域集中在深紫外波段,尤其是193、248、266、355纳米等关键激光波长,同时它也广泛应用于可见光、近红外及中红外光谱范围。
2. 双折射与分光角
以532纳米波长为例,典型的分光夹角范围在1°至5°之间。实际应用中,该角度可以通过定制棱镜顶角的方式进行灵活调整,以满足不同光路需求。
3. 光学指标
- 消光比:标准级产品可达到较高水平,精密级产品则表现更为出色。
- 损伤阈值:在1064纳米波长下性能优异,特别是在深紫外波段,具备出色的抗损伤能力。
- 面形精度:常规产品可满足大多数应用场景,精密检测需求则需更高标准的面形精度。
4. 拼接工艺
这里需要区分两种技术路线:
- 光胶结构:不添加任何有机胶层,专为深紫外、高功率激光场景设计,无吸收和老化问题,光学稳定性最优。
- 胶合结构:成本相对较低,但仅适用于400纳米以上波长、功率要求不高的光路系统。
5. 通光孔径
常用规格包括Φ6、8、10、15、20毫米。设计时通常建议预留1.2至1.5倍的光束余量,以有效规避边缘效应引起的光学损耗。
三、性能对比
为了更直观地了解不同类型偏振棱镜的定位差异,以下提供对比表格:
| 类型 | 透光范围 | 分光特点 | 优势场景 |
|---|---|---|---|
| MgF₂沃拉斯顿 | 110~7000nm | 双光束双向偏折 | 深紫外偏振分光、差分检测 |
| MgF₂洛匈 | 110~7000nm | 一束直通一束偏折 | 光路准直要求较高的系统 |
| α-BBO 沃拉斯顿 | 190~3500nm | 分光角度大 | 大角度分光、可见光激光 |
| 石英沃拉斯顿 | 200~2300nm | 双折射偏小 | 低成本普通光路应用 |
四、主流应用场景
1. 半导体精密检测
在193/266纳米光刻光路、晶圆缺陷扫描、薄膜椭偏测厚等环节中,沃拉斯顿偏振棱镜用于实现正交偏振差分成像,能够有效识别纳米级的细微瑕疵。
2. 深紫外激光系统
紫外打标、刻蚀、精密切割等激光设备,都需要它来完成偏振分光合束任务,精确调控激光输出的偏振状态。
3. 干涉测量仪器
在激光干涉仪、位移传感器、光谱分析仪中,沃拉斯顿偏振棱镜能够将正交偏振光有效分离,从而支撑高精度的相位与光强检测。
4. 光学通信与传感
光纤偏振解调、红外传感光路中,它负责实现偏振分束功能,有效提升信号的识别分辨率与系统信噪比。
5. 科研偏振实验
在量子光学、偏振光谱、偏振成像等前沿研究领域,沃拉斯顿偏振棱镜作为标准偏振分光核心元件,地位稳固且不可或缺。
五、选型设计要点
最后,结合实际选型经验,以下几点值得特别关注:
1. 短波长应用场景,应优先考虑光胶结构,避免胶层吸收紫外光导致元件性能下降或损坏。
2. 分光夹角需根据光路间距合理确定,棱镜顶角必须与实际安装空间精确匹配。
3. 高功率工况下,建议优先选用高损伤阈值的基材,并配合精密面形加工工艺,才能确保长期稳定运行。




