想象一下,水下机器人在浑浊的海水里,想跟同伴“发个微信”——不是开玩笑,这背后其实是一道实打实的物理难题。最近,美国佛罗里达大学团队拿出了一套新方案,名字挺酷,叫BlueME。
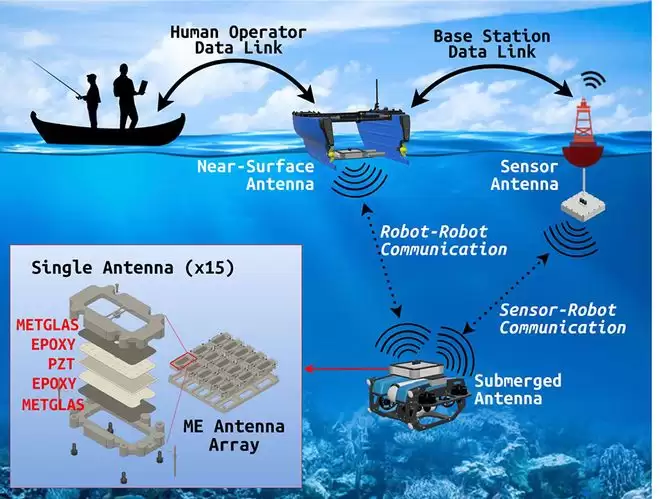
这套系统的核心是一块3×5的磁电天线阵列。在仅10瓦的功耗下——跟一个普通LED灯泡差不多——就能让水下机器人之间实现最远730米的数据传输。够远,也够省电。
更关键的是,BlueME完全不受水体浑浊度或障碍物的干扰。换句话说,机器人只用自带电池,就有可能在数百米外跟同伴实时交换数据,不用浮出水面,也不用拖着长长的线缆。
长期以来,水下通信一直是个老大难问题:射频电磁波入水就衰减得厉害,每米能掉1到10分贝,有效距离只有几米;声学通信虽然传得远,但多径干扰和多普勒效应折腾得够呛,而且高强度声波还可能伤到海洋生物;光学通信带宽高、延迟低,可一旦水变浑就“抓瞎”,还受视线限制。
BlueMe走的是一条不同的路——利用磁电材料的固有谐振频率,在甚低频/低频段高效发射和接收电磁信号。整个系统紧凑、高效,功耗还特别低。
实测数据很有说服力:在淡水湖里,1瓦功耗就能实现200米通信;在墨西哥湾的海水里,10瓦功耗下通信距离达到730米。这已经超越了实验室验证的阶段,是真刀真枪的自然环境测试。
研究由佛罗里达大学电气与计算机工程系的助理教授Md Jahidul Islam和Adam Khalifa博士主导。Islam长期研究水下机器人,而Khalifa的背景更有意思——他之前主要做微创无线医疗微型设备,那种可以通过注射植入人体的东西。
“我花了多年时间研究微型无线植入设备,以及高导电环境下的高效电力传输,”Khalifa在一次采访中说,“后来我突然意识到,我们的身体实际上是由微咸的水构成的。人体内与水下通信面临的物理挑战有很多相似之处。这一认识让我用一种全新的视角来思考水下通信。”
(来源:IEEE Journal of Oceanic Engineering)
水下多机器人协同作战之所以难,根本原因在于通信带宽和范围都极其有限。传统方案要么只交换稀疏的状态信号,要么让机器人定期浮出水面传数据——这两种方式都严重拖累实时自主性和协同能力。
BlueME正好补上了这块短板。在海洋实验中,它用紧凑节能的架构实现了730米以上的通信范围,并且能以每10分钟一次的频率反馈任务进展。操作员拿到这些数据,就能及时做决策、调整任务,而不是两眼一抹黑等机器人浮上来。

(来源:佛罗里达大学)
另一个让人眼前一亮的特点是成本。据研究团队估算,15单元阵列的硬件成本总共也就几十美元。相比之下,商用声学调制解调器动辄几千美元。这么低的成本,未来大规模部署的门槛就小得多了。
当然,技术还远没到完美的程度。目前BlueME的数据速率理论估算在千比特每秒到上百千比特每秒之间,虽然比传统声学链路快,但跟光学通信的兆比特级别还有差距。另外,磁电天线在高驱动幅度下会产生较明显的非线性效应,这也是后续需要攻克的问题。
研究团队已经在真实湖泊和开放海域完成了多轮测试,通信距离从数十米到730米不等。据论文所述,这是已知文献中,小型磁电天线阵列首次走出实验室水箱,在自然海水环境下完成水下机器人间的通信验证,也是迄今规模最大的甚低频/低频磁电阵列系统。
这项技术目前还是早期阶段。团队已经提交了相关专利申请,计划继续完善技术、逐步扩大自主水下机器人的测试范围。长远来看,随着性能的进一步提升和大规模部署,BlueME有潜力成为复杂海洋环境中水下机器人协作与运行的新范式。
参考资料:
1.M. Talebi, S. Mahmud, A. Khalifa and M. J. Islam, BlueME: Robust Underwater Robot-to-Robot Communication Using Compact Magnetoelectric Antennas, in IEEE Journal of Oceanic Engineering, doi: 10.1109/JOE.2026.3675822.
2.https://www.eurekalert.org/news-releases/1130200




