先聊聊背景。许多同行在从事图像去雨、图像去雾等视觉任务时,常常面临同样的痛点——算法处理后要么过度平滑导致细节丢失,要么残留明显的雨痕或雾迹。此前我正好在该方向做了大量实践,现将完整的思路与代码整理成文,希望能为正在探索的你提供切实帮助。
图像去雨技术前言
从单张静态图像中去除雨滴,听起来似乎容易,实际操作却极具挑战。雨点覆盖的像素区域通常非常微小,这引发了一个核心难题——究竟应该处理哪些像素,哪些又应当完整保留?目前基于FFT的去雨方法虽然不少,但效果往往参差不齐。本文另辟蹊径,采用L0梯度最小化方法,专门针对雨像素进行去除,同时避免破坏图像中原本重要的边缘结构。
具体而言,该方案具备以下三大显著优势:
- L0最小化技术能够在全局尺度上控制图像中的非零梯度数量,它不会纠缠于局部微小变化,而是精准关注那些真正显著的边缘结构。
- 显著边缘得以完整保留,而低幅度的琐碎细节(例如雨痕)则被有效平滑。这正是实现高质量去雨的核心机制。
- 最后通过直方图调整技术,恢复去雨后的图像强度,从而获得更佳的对比度表现。实验验证表明,该流程在去除雨水方面具有显著效果。
去雨算法流程

去雨代码实现(MATLAB)
clear;
close all;
I=imread('youwutu.jpg'); %读入图像
R=I(:,:,1);% 取输入图像的R分量
[N1,M1]=size(R);
R0=double(R);% 对R分量进行数据转换,并对其取对数
Rlog=log(R0+1);
Rfft2=fft2(R0);% 对R分量进行二维傅里叶变换
sigma=250;% 形成高斯滤波函数
F = zeros(N1,M1);
for i=1:N1
for j=1:M1
F(i,j)=exp(-((i-N1/2)^2+(j-M1/2)^2)/(2*sigma*sigma));
end
end
F=F./(sum(F(:)));
Ffft=fft2(double(F)); %对高斯滤波函数进行二维傅里叶变换
DR0=Rfft2.*Ffft;%对R分量与高斯滤波函数进行卷积运算
DR=ifft2(DR0);
DRdouble=double(DR); %在对数域中,用原图像减去低通滤波后的图像,得到高频增强图像
DRlog=log(DRdouble+1);
Rr=Rlog-DRlog;
G=I(:,:,2); % 取输入图像的G分量
[N1,M1]=size(G);
G0=double(G);%对G分量进行数据转换,并对其取对数
Glog = log(G0+1);
Gfft2=fft2(G0);%对G分量进行二维傅里叶变换
sigma=250;
for i=1:N1
for j=1:M1
F(i,j)=exp(-((i-N1/2)^2+(j-M1/2)^2)/(2*sigma*sigma));
end
end
F = F./(sum(F(:)));
Ffft=fft2(double(F));%对高斯滤波函数进行二维傅里叶变换
DG0=Gfft2.*Ffft;%对高斯滤波函数进行二维傅里叶变换
DG=ifft2(DG0);
DGdouble=double(DG); %在对数域中,用原图像减去低通滤波后的图像,得到高频增强图像
DGlog=log(DGdouble+1);
Gg=Glog-DGlog;
EXPGg=exp(Gg); %取反对数,得到增强后的图像分量
MIN = min(min(EXPGg)); %对增强后的图像进行对比度拉伸增强
MAX = max(max(EXPGg));
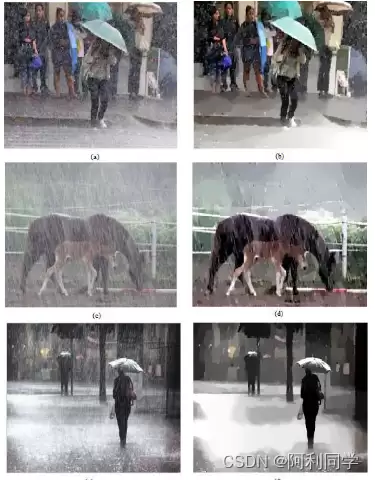
去雨效果MATLAB实验结果


图像去雾技术
去雾算法原理概述
去雾技术的理论基础是暗通道先验理论。简而言之,在绝大多数非天空的局部区域中,至少有一个颜色通道上存在某些像素的值极低——意味着该区域的光照强度非常小。基于这一观察,我们可以对“暗通道”给出如下数学定义:对于任意输入图像J,其暗通道的计算公式为:
其中c代表彩色图像的各个通道,Ω(x)表示以像素x为中心的某个局部窗口区域。
暗通道图的计算步骤并不复杂:首先求出每个像素在三个颜色通道上的最小值,将其存储为一个二维矩阵(即灰度图),随后执行一次最小值滤波。滤波半径由所选窗口大小决定,窗口大小设为……相应的公式为:……其中r代表滤波半径。
关于暗通道先验为何成立,相关论文给出了以下几条合理阐述:
- 汽车、建筑物、城市玻璃窗的阴影,以及树叶、树木、岩石等自然景观所形成的投影区域;
- 色彩鲜艳的物体或表面——如绿色的草地、树木、植被,红色或黄色的花朵、叶片,以及蓝色的水面——这些物体在RGB三个通道中总有一个或两个通道的值非常低。
去雾代码实现
计算雾化图像的暗通道
def DarkChannel(img, size=15):
"""
暗通道的计算主要分成两个步骤:
1.获取BGR三个通道的最小值
2.以一个窗口做MinFilter
ps.这里窗口大小一般为15(radius为7)
获取BGR三个通道的最小值就是遍历整个图像,取最小值即可
"""
r, g, b = cv2.split(img)
min_img = cv2.min(r, cv2.min(g, b))
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (size, size))
dc_img = cv2.erode(min_img, kernel)
return dc_img估算全局大气光值
def GetAtmo(img, percent=0.001):
"""
1.计算有雾图像的暗通道
2.用一个Node的结构记录暗通道图像每个像素的位置和大小,放入list中
3.对list进行降序排序
4.按暗通道亮度前0.1%(用percent参数指定百分比)的位置,在原始有雾图像中查找最大光强值
"""
mean_perpix = np.mean(img, axis=2).reshape(-1)
mean_topper = mean_perpix[:int(img.shape[0] * img.shape[1] * percent)]
return np.mean(mean_topper)估算透射率图
def GetTrans(img, atom, w):
"""
w为去雾程度,一般取0.95
w的值越小,去雾效果越不明显
"""
x = img / atom
t = 1 - w * DarkChannel(x, 15)
return t
def GuidedFilter(p, i, r, e):
"""
:param p: input image
:param i: guidance image
:param r: radius
:param e: regularization
:return: filtering output q
"""
# 1
mean_I = cv2.boxFilter(i, cv2.CV_64F, (r, r))
mean_p = cv2.boxFilter(p, cv2.CV_64F, (r, r))
corr_I = cv2.boxFilter(i * i, cv2.CV_64F, (r, r))
corr_Ip = cv2.boxFilter(i * p, cv2.CV_64F, (r, r))
# 2
var_I = corr_I - mean_I * mean_I
cov_Ip = corr_Ip - mean_I * mean_p
# 3
a = cov_Ip / (var_I + e)
b = mean_p - a * mean_I
# 4
mean_a = cv2.boxFilter(a, cv2.CV_64F, (r, r))
mean_b = cv2.boxFilter(b, cv2.CV_64F, (r, r))
# 5
q = mean_a * i + mean_b
return q上述代码同样提供了Python版本实现。
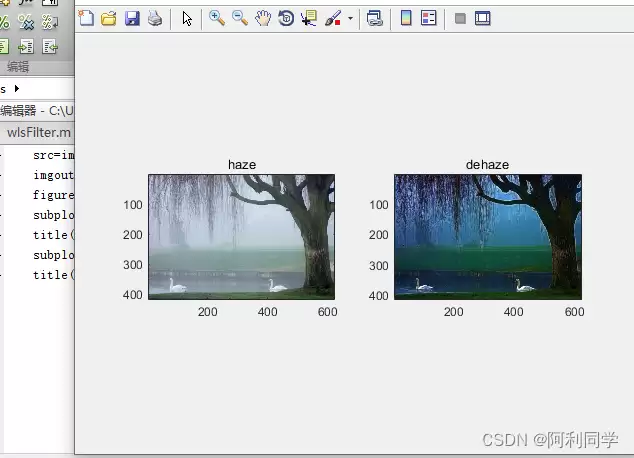
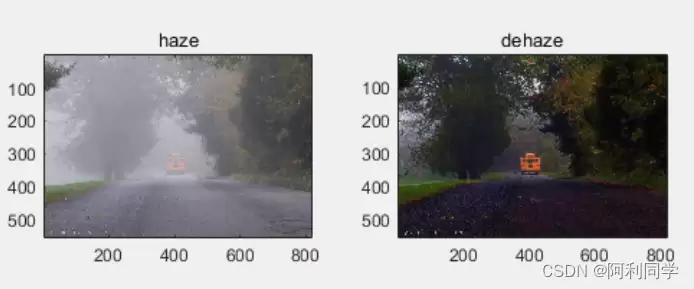
去雾结果(MATLAB GUI交互展示)
总结与展望
本文所述方法仅是整个技术链条中的一个环节,其核心目的在于为目标检测及其他高级视觉应用奠定坚实基础。通过将所提算法与经典方法进行对比验证,实验结果表明:在极端恶劣环境下,本文的图像去雨去雾结合目标检测与测距方案具有良好的有效性和可行性。经过预处理的图像输入到目标检测和测距模型后,检测精度显著提升,从而为自动驾驶车辆的主动安全行为决策提供了必要的技术支撑,也使得自动驾驶汽车在极端环境下的安全运行成为可能。





