vLLM Semantic Router 多模态视觉信号通路排查与修复全记录
本文深入探讨 vLLM 生态中一项技术含量极高的子项目——vLLM Semantic Router。该项目最新发布的博客详细记录了一次多模态视觉信号通路的排查与修复全过程,其排查链路极具工程参考价值,值得仔细研读。
vLLM 最新版本发布:推测解码终于能够支持思考模型了
vLLM 持续领先:登顶开源推理引擎 No.1
vLLM Semantic Router 究竟是何方神圣?
vLLM Semantic Router(简称 VSR)是 vLLM 旗下的一套智能路由系统,GitHub 上已获得 4.2k Stars,核心代码使用 Go 语言编写。其定位是「面向混合模型的系统级智能路由器」,适用于云端、数据中心及边缘计算场景。
 VSR 整体架构示意图
VSR 整体架构示意图
VSR 体系架构总览
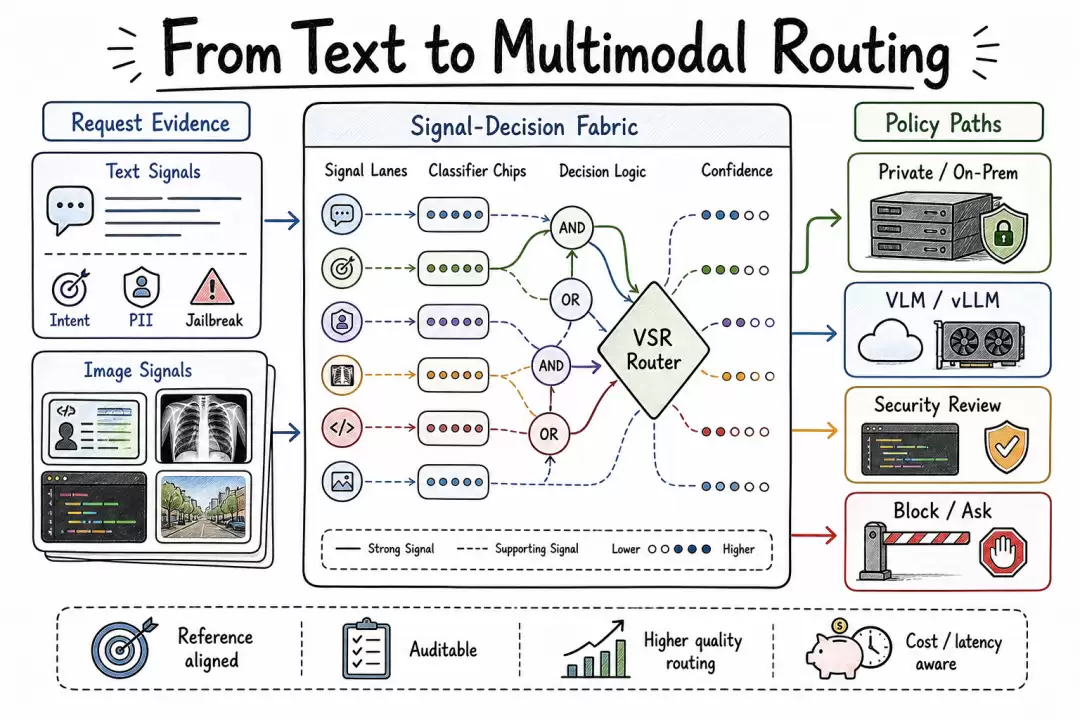
VSR 与普通路由器的核心区别在于其 Signal-Decision 架构。传统路由器收到用户 prompt 后直接匹配某个模型终端;而 VSR 在请求送达推理模型之前,会额外执行一项关键操作:从请求中提取多种信号(包括意图、关键词、嵌入向量、安全检测、PII 识别、语义缓存等),再将它们组合成决策依据。
信号是独立的观察结果,决策则通过优先级与布尔逻辑组合信号来生成。这种架构赋予路由策略可编程能力——可以表达诸如「安全敏感的代码审查走强推理模型 + 越狱检测」这类复合策略,而不仅仅是「计算机科学请求走编程模型」这种简单的分类。
VSR 已历经两个主要版本:Iris 引入了 Signal-Decision 架构,使路由决策可组合;Athena 则进一步扩展,加入了模型选择、记忆、重放以及更丰富的信号处理能力。
下一个要跨越的边界是多模态。
多模态路由:图像成为请求级的策略关键证据
一旦请求中包含图片、截图、扫描件或文档页面,路由器就不能仅依赖 prompt 文本。图像很可能才是决定路由走向的核心证据。
举几个典型场景:
请求内容 | 纯文本路由器看到的 | 多模态路由器应该看到的 |
|---|---|---|
"帮我总结一下" + 护照图 | 通用摘要请求 | 身份证件、PII 风险、需要限制处理 |
"这是什么?" + 胸片 X 光 | 模糊的图像问题 | 临床图像、医疗领域策略、需要高能力 VLM |
"找 bug" + 代码截图 | 编程请求 | 代码截图、可能泄露密钥、需要安全审查 |
医疗 prompt + 无关汽车图 | 医疗文本 | 文本和图像证据不匹配、需要澄清或拒绝 |
 策略层架构示意图
策略层架构示意图
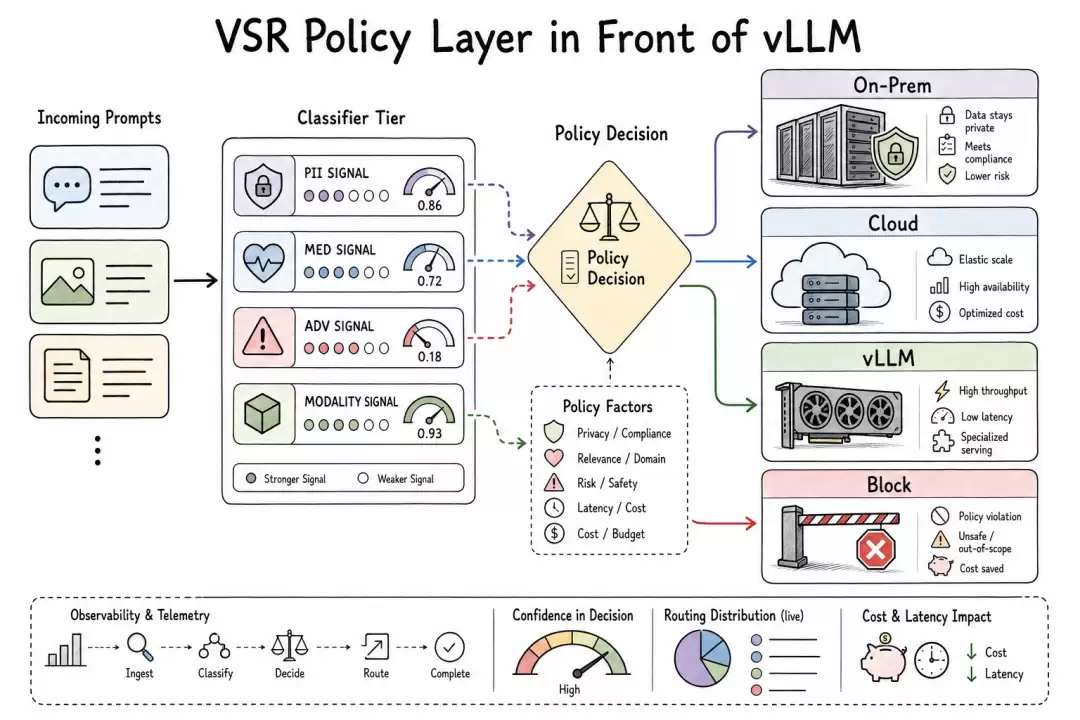
策略层示意说明
关键在于:图像嵌入在 VSR 中被视为一种有类型的信号,与文本意图、PII 检测、越狱检测、语义相似度等信号一起,在同一决策织体中参与组合。这让 VSR 从 prompt 级路由升级为请求级策略控制。
这也意味着信号的正确性成为控制面的硬性要求。文本信号出错,策略可能走错模型或跳过插件;而视觉信号如果出现反转(anti-correlated),问题更为严重——路由器会在错误方向上充满信心,同时审计日志却看起来一切正常。
视觉信号「自信地错了」:82% 的反转率
问题最初暴露时,症状并非「精度低了一点」这么简单。
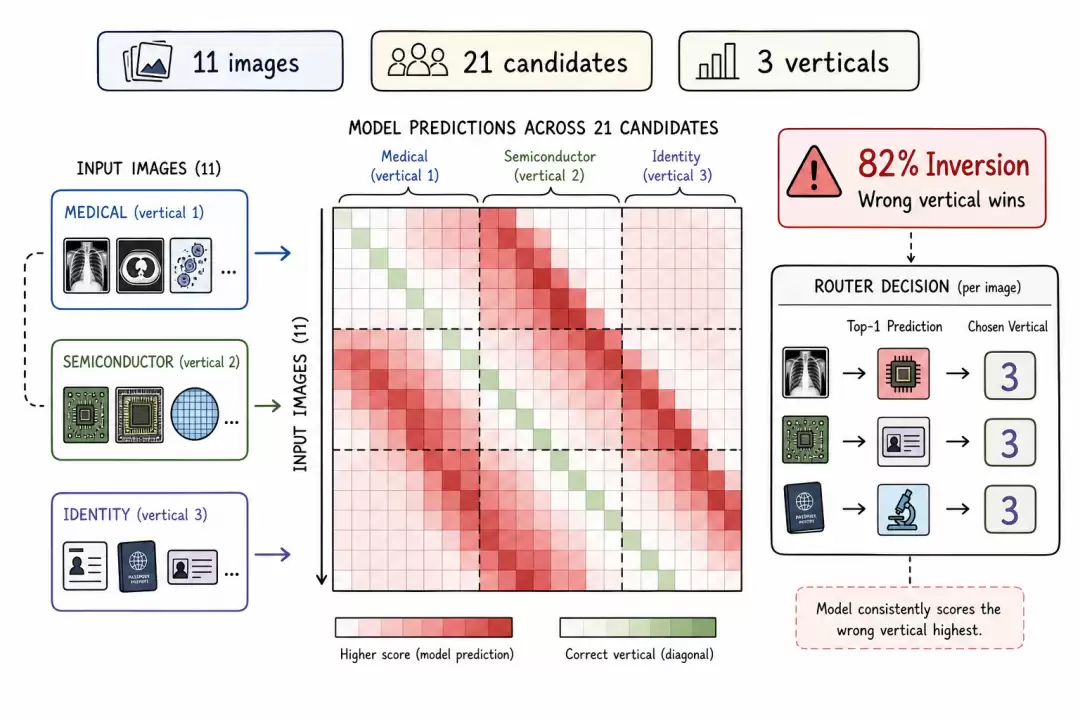
在一个包含 11 张图 × 21 个候选标签的探测实验中,部署的 multi-modal-embed-small(mmes)路径在 9 张图上都将错误的垂直领域排在最高。医疗 X 光的得分更接近半导体候选标签,而非医疗标签;身份证件也无法可靠地匹配到身份证件锚点。
82% 的反转率。信号是反相关的,而不仅仅是带有噪声。
 反转热力图可视化
反转热力图可视化
反转热力图显示
这种故障模式的危险性远超过单纯的精度下降。弱分类器产生的是不确定性——决策层可以设置阈值进行过滤;而反转分类器产生的是对错误方向的信心——决策层会信任这个信号,然后错误地将请求路由到完全无关的路径上。
在多模态策略层里,这种状况比完全没有图像信号更糟糕。
诱人的误诊:换更强的编码器?
第一反应非常自然:是不是这个紧凑的编码器太弱了?团队同期正在探索 SigLIP2 家族和更大的 multi-modal-embed-large 方向,升级编码器看起来是顺理成章的修复方案。
直接进行了测试:
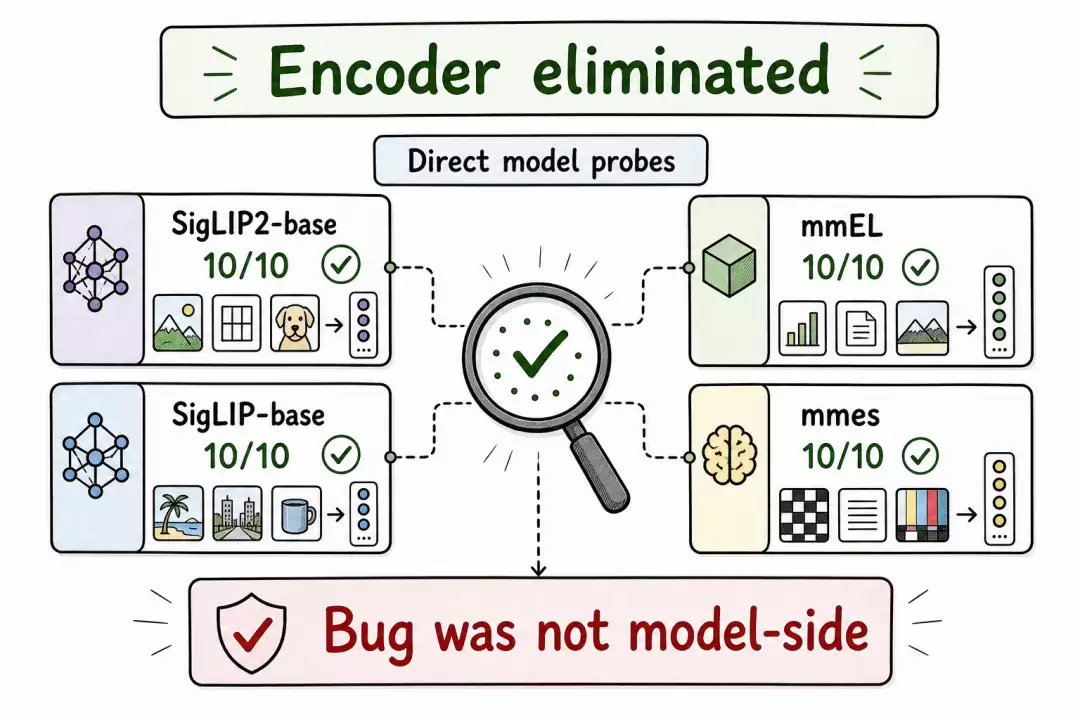
- SigLIP2-base 在同一个 21 标签探测上得分 10/10
- SigLIP-base 通过 Hugging Face Transformers 加载,得分 10/10
- multi-modal-embed-large(视觉塔基于 SigLIP2)得分 10/10
- mmes 模型通过 PyTorch 参考路径加载,也得分 10/10
 编码器排除实验结果
编码器排除实验结果
编码器排除实验展示
最后一行彻底改变了调查方向。mmes 模型本身没有问题,通过参考路径加载时行为完全正确。编码器家族并非根因。
(SigLIP2 的更大变体 so400m 在分布外拒绝上表现更好,在探测中对一张误入的汽车引擎图片压制得更彻底。这对未来更大视觉塔的防御性路由有参考价值,但并非当前 bug 的原因。)
改变调查走向的参考对比
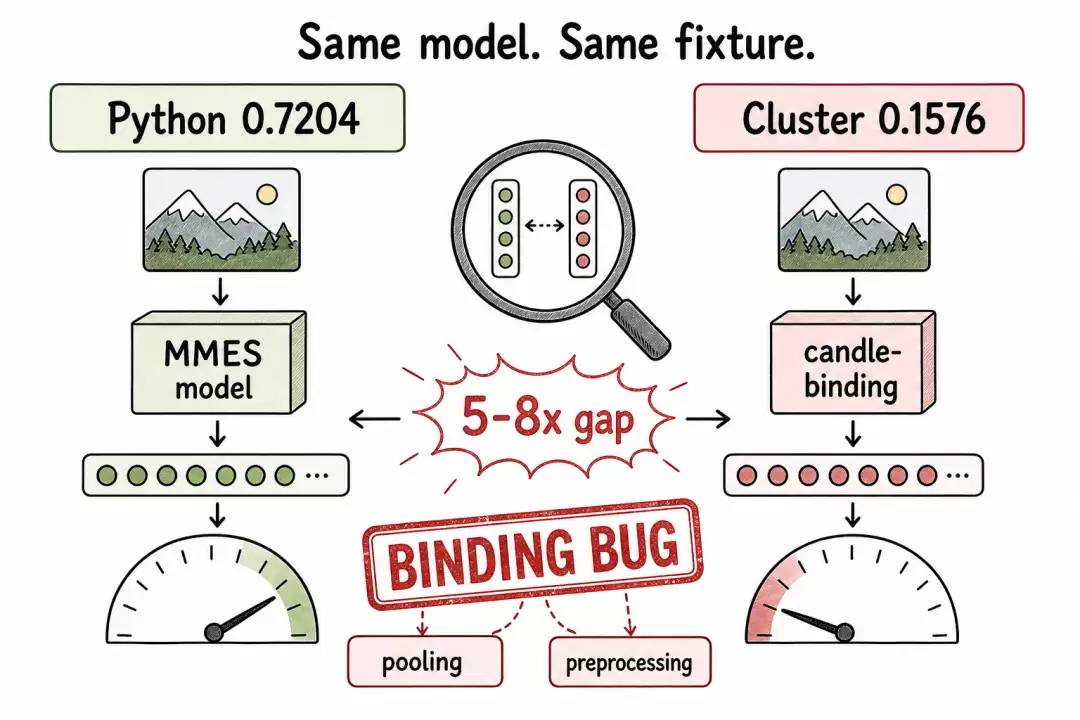
决定性的测试非常简单:同一个 mmes 模型、同一张护照测试图、两条路径,对比嵌入行为。
- PyTorch 参考路径返回的余弦相似度:0.7204
- 部署的 Candle 绑定路径返回的余弦相似度:0.1576
同一个模型、同一张图,出现了 5-8 倍的数值差距。
 诊断差距对比
诊断差距对比
诊断差距示意图
到了这一步,问题不再是「模型选哪个」,而是「生产路径在哪一层偏离了参考路径」。
这里有一条非常实用的经验:对于多模态路由,参考对比(reference comparison)应该是第一步诊断手段,而不是最后一步。当生产嵌入路径行为异常时,先使用模型官方参考加载器跑一遍,再考虑模型本身是否太弱。
在 VSR 体系中这一点尤为重要——嵌入不只是一个检索原语,它是策略证据。如果策略证据与参考模型方向相反,下游每一层逻辑都可以是正确的,但运行结果全是错的。
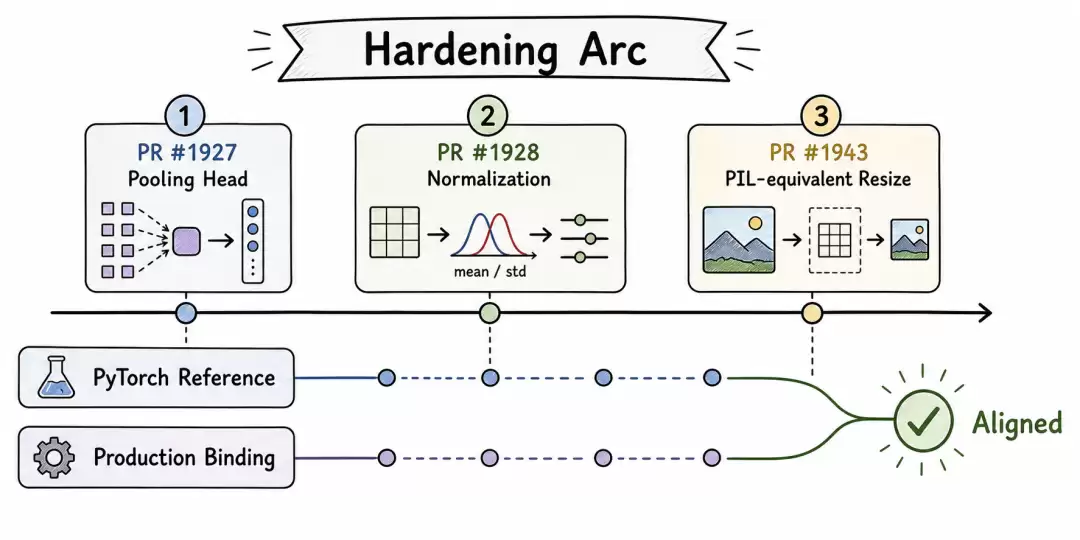
三层 Bug 的定位与修复
问题出在 Candle 绑定路径的实现细节上,而非模型权重。三个 PR 将问题定位到了具体的层次。
 修复演进弧线
修复演进弧线
修复弧线展示
第一层:池化头实现错误(PR #1927)
Candle 绑定中 SigLIPVisionEncoder::forward 使用的是 BERT 风格的 mean + Linear + tanh 池化。而 SigLIP 实际使用的是 attentional probe pooling head——一个学习的探针参数通过 cross-attention 对 patch token 做聚合,再接 LayerNorm + MLP 残差连接。
修复前后的对比(同一张护照测试图):
状态 | 余弦相似度 |
|---|---|
修复前(BERT 风格池化) | 0.1576 |
修复后(attentional probe 池化) | 0.7068 |
PyTorch 参考 | 0.7204 |
修复后与参考路径的差距缩小到 1.9%。
还有一个相关的细节:修复前的代码里存在一个静默回退机制。head.probe 的加载先尝试按 Linear 格式解析,失败后回退到 head.dense。但 SigLIP 的 head.probe 是一个 [1, 1, hidden] 的单张量,不是 Linear 的 weight + bias 对;SigLIP 权重里也没有 head.dense 键。两个都匹配失败后,编码器静默退化为 mean pooling。这种静默回退正好掩盖了这类加载错误。
第二层:图像归一化缺失(PR #1928)
Go 端的图像加载器 decodeAndResizeImage 输出 CHW float32 像素值,范围 [0, 1]。SigLIP 训练时期望的输入是经过逐通道归一化的,等价于 (x - 0.5) / 0.5,范围 [-1, 1]。之前的 Rust 代码直接消费了 [0, 1] 的值,导致视觉激活在错误的输入分布上运行。
在池化头修复的基础上,加上归一化修复:
状态 | 余弦相似度 | 与参考的偏差 |
|---|---|---|
池化修复后,归一化前 | 0.6843 | 2.9% |
池化 + 归一化修复后 | 0.6991 | 0.8% |
PyTorch 参考 | 0.7044 | 基线 |
归一化修复消除了约 74% 的残余偏差。
第三层:预处理插值不匹配(PR #1943)
前两层修复后仍有约 1% 的余弦偏差。进一步定位发现,差异来自图像缩放的插值方法。Go 端使用的是 4-tap bilinear 插值,无抗锯齿。PyTorch 参考路径通过 SiglipProcessor 使用 PIL 的 bicubic + antialias。
修复方案是将图像解码、缩放、CHW float32 转换全部移到 Rust 端,使用 image crate 的 FilterType::CatmullRom(三次 B 样条,B=0, C=0.5)。CatmullRom 的带窗加权采样在缩小场景下近似 PIL 的 bicubic + antialias 行为。
Go 端的 decodeAndResizeImage 函数直接移除,新增 Rust FFI 入口 multimodal_encode_image_from_bytes。
这类 bug 在跨语言推理栈中特别容易遗漏。Go 层、Rust FFI 层、Candle 模型实现、PyTorch 参考——每一层单独看都合理,但端到端串起来就产生了路由级别的偏差。
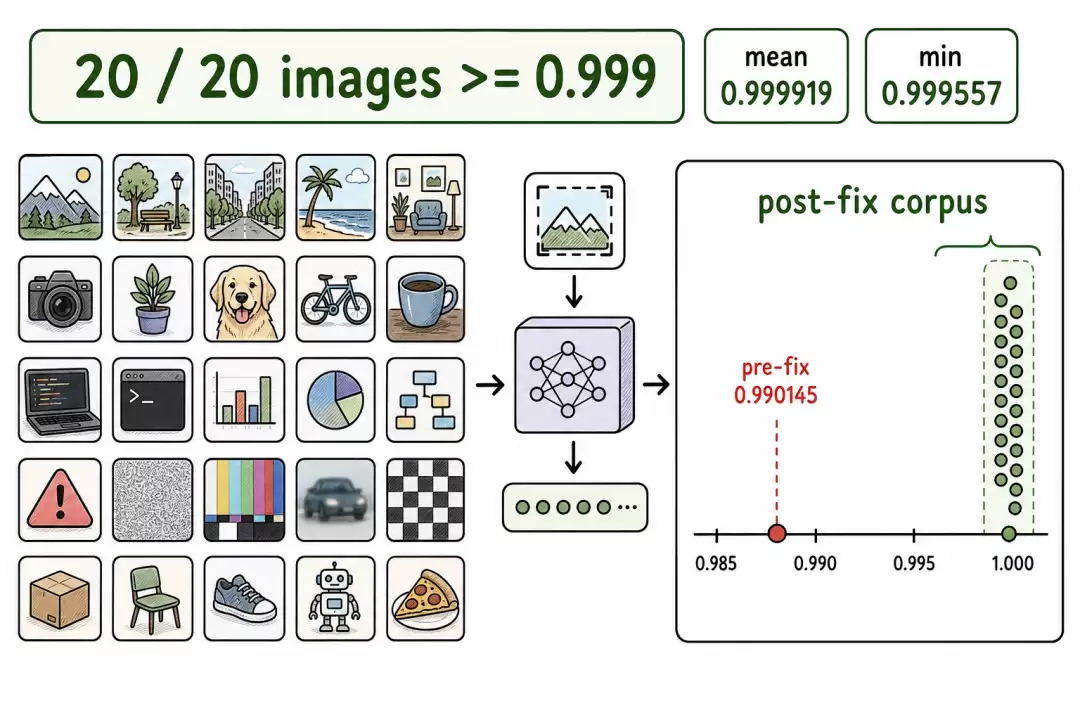
验证:20 张图全部 cosine ≥ 0.999
三个 PR 全部应用后,在一张护照标准图上进行了三向量隔离实验,将 model-forward 偏差和预处理偏差分开测量:
对比项 | 余弦 | 最大绝对差 | 隔离的变量 |
|---|---|---|---|
Python vs Candle-PIL | 0.999989 | 0.000911 | 仅 model-forward |
Candle-PIL vs Candle-Go | 0.999916 | 0.001992 | 仅预处理 |
Python vs Candle-Go | 0.999902 | 0.002120 | 完整管线 |
第一行说明 Rust 移植的 SigLIP 视觉塔与 PyTorch 参考在 fp32 噪声层面已经对齐。残余偏差全部来自预处理。
 20 张图语料对齐结果
20 张图语料对齐结果
20 张图语料对齐展示
在覆盖身份证件、环境照片、代码截图、对抗样本和分布外样本的 20 张图语料上:
- 余弦:最低 0.999557,平均 0.999919,最高 0.999978
- 20/20 全部 cosine ≥ 0.999
- 修复前预处理的余弦值是 0.990145
隔离实验的方法论本身比最终数字更重要:先把生产路径和参考路径对比,再把 model-forward 偏差和预处理偏差分开,最后让生产路径在测试和服务中使用相同的预处理语义。
修复解锁了哪些能力
视觉路径可信之后,VSR 可以将图像视为一等证据,而不再是边通道元数据。文本信号和图像信号在同一个 Signal-Decision 织体中参与决策:
组合信号模式 | 决策示例 |
|---|---|
临床文本 + 临床图像 + PHI/PII 信号 | 走受保护的医疗 VLM 路径,开启隐私插件 |
通用文本 + 身份证件图像 | 拦截、脱敏或走身份文件处理策略 |
代码/安全 prompt + 代码截图 | 走安全专用模型,保持越狱检测 |
领域内文本 + 领域外图像 | 要求澄清或拒绝图像证据 |
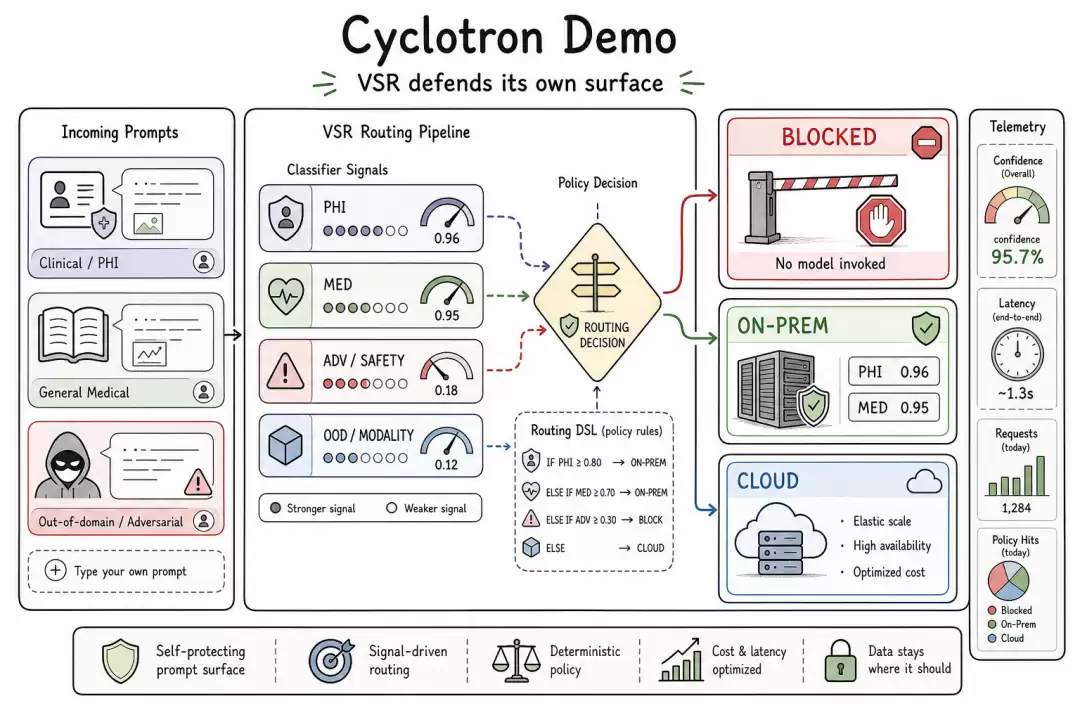
VSR 还提供了一个公开 demo Cyclotron,目前展示的是文本路由版本的策略模式:领域相关性检查、隐私敏感路由、模型调用前的拦截。该 demo 展示了策略的形态——多模态版本在同一个策略引擎上扩展,只是证据面更大。
 Cyclotron 演示示例
Cyclotron 演示示例
Cyclotron Demo 图示
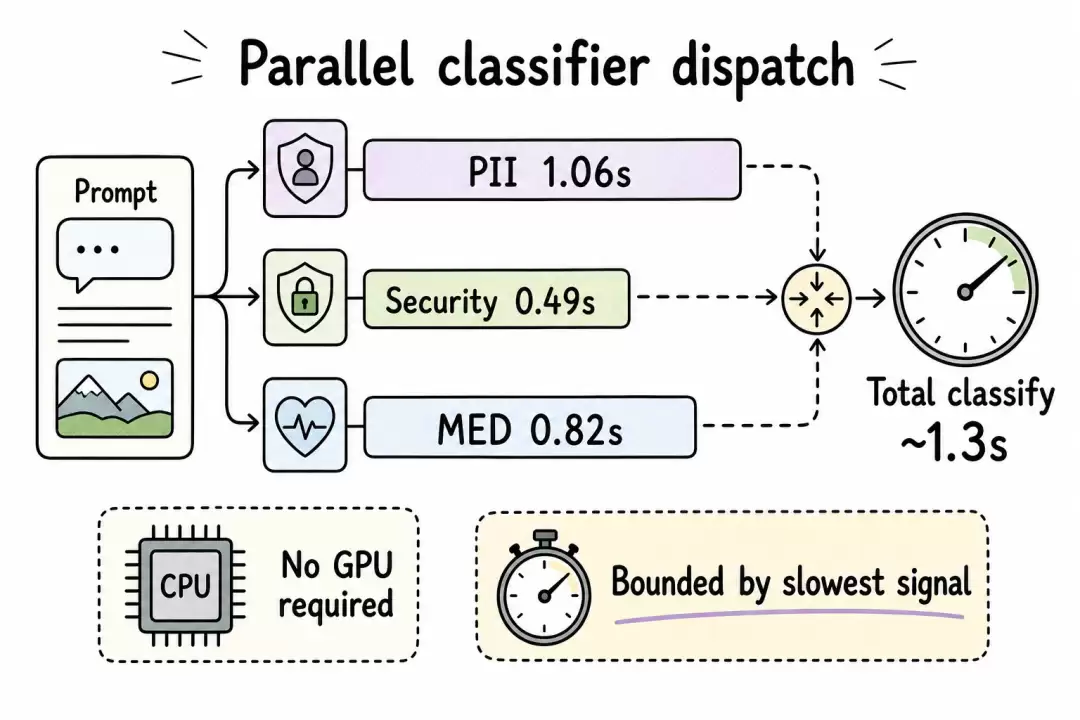
文本路由路径还有一个与多模态生产相关的性能特性:分类信号通过 runSignalDispatchers 并发执行,wall-clock 延迟取决于最慢的那个分类器,而不是所有分类器的延迟之和。在一个代表性 trace 里,完整分类决策在 CPU 上约 1.3 秒完成。
 并行分发示意图
并行分发示意图
总结
此次 VSR 视觉信号通路的修复,核心经验有三条:
- 参考对比是第一诊断手段。嵌入行为异常时,先拿参考路径跑同一个 fixture 对比,再怀疑模型本身。
- 反转比噪声更危险。弱信号让决策层产生不确定性,反转信号让决策层产生错误信心。在策略层里,后者更难被发现。
- 跨语言推理栈的每一层看起来都合理,串起来可能完全错。池化头、归一化、预处理插值——每个都是「实现细节」,但三个叠加起来就是 82% 的反转率。
VSR 的目标是让请求中每一个有意义的部分——文本、图像,未来可能还有音频和工具调用——都能进入同一个可编程的路由大脑。文本路由是第一个控制面,多模态路由则是下一个。
项目地址:/vllm-project/semantic-router
#vLLM #SemanticRouter #多模态路由 #SigLIP #跨语言推理




