YOLOv8+DeepSORT行人车辆计数与目标跟踪
时间:2026-06-01 08:10
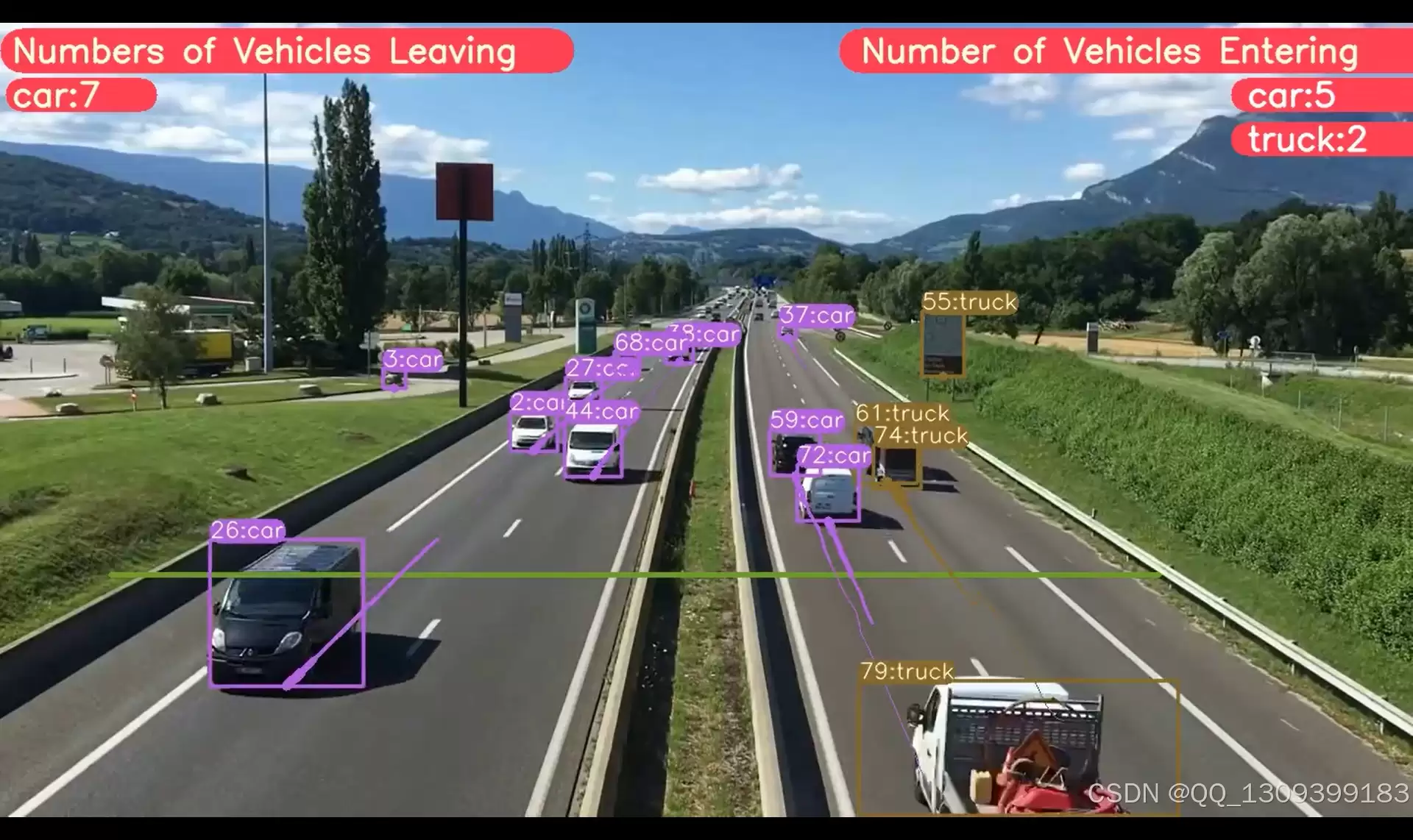
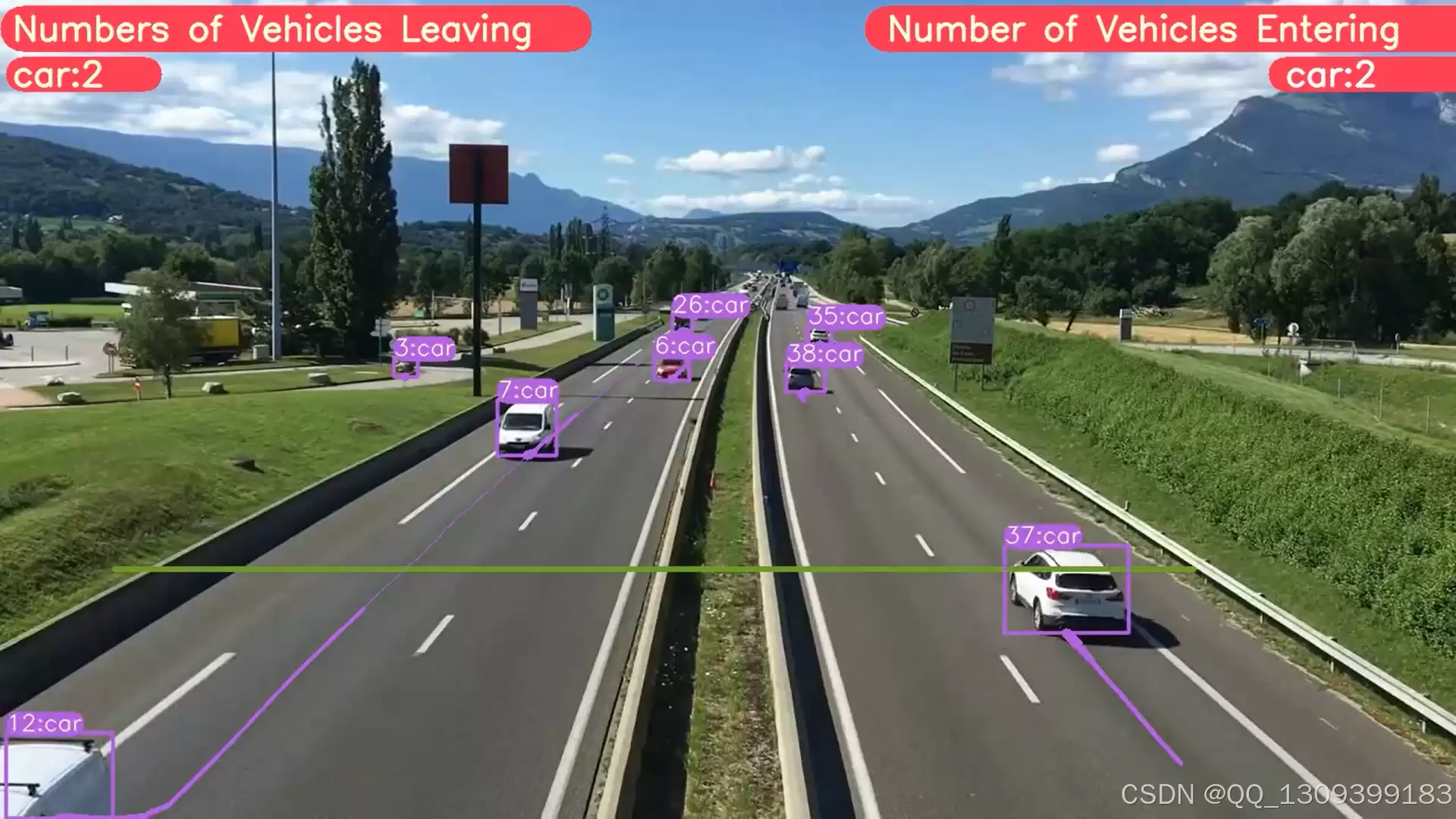
YOLOv8与DeepSORT结合构建高精度目标检测与多目标跟踪系统。YOLOv8提供高效检测,DeepSORT通过卡尔曼滤波和级联匹配实现稳定跟踪,支持目标ID分配与轨迹绘制,适用于智能安防、交通管理等场景中的行人车辆计数。
### YOLOv8目标检测与DeepSORT跟踪技术简介
在计算机视觉领域,目标检测和跟踪是两大核心任务。简单来说,检测是识别图像或视频中的特定物体并定位,而跟踪则是在连续帧中持续锁定这些物体的身份和运动轨迹。今天要聊的这套组合——YOLOv8搭配DeepSORT,堪称目前工业界高精度检测与跟踪的黄金搭档,尤其在ID分配和轨迹绘制方面表现抢眼。下面就把这套方案的来龙去脉、使用方法和关键价值一次性讲清楚。
#### 一、YOLOv8: 目标检测的新里程碑
YOLO(You Only Look Once)系列从诞生起就以速度和准确性的平衡闻名。到了YOLOv8,这个家族又往前迈了一大步。它继承了前代模型的优势,同时在网络结构、数据增强和训练策略上做了针对性优化——更高效的网络设计、更智能的数据增强手段,让模型在保持快速推理的同时,检测精度明显提升。而且它支持多种输入尺寸,能灵活适配不同场景。对开发者来说,YOLOv8还提供了更友好的工具链,模型定制和部署的门槛进一步降低。
#### 二、DeepSORT: 在线多目标跟踪器
DeepSORT是在SORT算法基础上发展的在线多目标跟踪方法。它最大的改进是引入了深度学习特征提取网络,弥补了纯运动模型在目标外观变化(比如遮挡、形变)时的不足。核心思路包含几个关键环节:
- **卡尔曼滤波器**:用来估计每个目标的状态(位置、速度等),并预测下一帧可能出现的位置。
- **匈牙利算法**:解决数据关联问题——哪些检测框应该匹配给哪个已有的跟踪轨迹。
- **马氏距离**:衡量新检测与已有轨迹之间的相似度。
- **级联匹配策略**:优先根据外观特征匹配,若失败再用纯空间位置信息做兜底。
#### 三、YOLOv8与DeepSORT的融合应用
把YOLOv8的检测能力和DeepSORT的跟踪能力串联起来,就能搭建一套完整的视频分析系统,兼顾高质量检测和长时间稳定跟踪。具体流程如下:
1. **初始化阶段**:加载预训练好的YOLOv8模型,设定好参数。
2. **帧处理循环**:
- 对每一帧用YOLOv8做目标检测,得到边界框坐标和类别标签。
- 把检测结果送入DeepSORT模块,进行目标匹配和状态更新。
- 新出现的目标分配唯一ID,并开始记录其轨迹。
- 更新所有跟踪目标的当前状态(位置、速度等)。
3. **输出结果**:可视化显示带ID标注的目标框及历史轨迹。
这种组合特别适合需要长时间监控同一场景的应用,比如智能安防、自动驾驶等。通过给每个目标分配唯一标识,持续追踪其移动路径,系统的智能化和服务质量都能上一个台阶。
#### 四、ID分配与轨迹绘制的重要性
- **ID分配**:保证即使目标离开视野后再次出现,也能被正确认出——这是维持整个跟踪过程一致性和准确性的基石。
- **轨迹绘制**:不仅能直观看出目标的行为模式,还能辅助行为分析、异常检测等工作。举个交通管理的例子:通过分析车辆行驶路线,可以提前发现潜在的安全隐患点。
#### 五、总结
YOLOv8与DeepSORT的联合,提供了一种高效且可靠的方法来应对复杂环境下的目标检测与跟踪任务。两者优势互补,共同构成了一个强大而灵活的视觉分析平台。随着AI技术的持续演进,相信这类方案会催生更多创新应用,推动整个领域向前发展。
---
**附:实操步骤(保持原教程结构)**
#### 前往克隆文件夹并安装依赖
首先,进入你已从GitHub或其他代码托管平台克隆的YOLOv8-DeepSORT-Object-Tracking项目文件夹。打开终端或命令行,输入以下命令导航到项目目录:
```bash
cd YOLOv8
```
接着安装项目所需依赖。为安装开发环境下的所有依赖,执行:
```bash
pip install -e '.[dev]'
```
这条命令会根据`setup.py`自动安装所有必需的包,包括开发时需要的额外库。
#### 设置工作目录
切换到YOLOv8检测脚本所在目录:
```bash
cd ultralytics/yolo/v8/detect
```
#### 下载DeepSORT文件
从Google Drive下载DeepSORT相关的ZIP文件,解压后将`deep_sort_pytorch`文件夹放到`yolo/v8/detect`目录下。具体链接如下:
- [DeepSORT 文件夹](https://drive.google.com/drive/folders/1kna8eWGrSfza)
#### 下载示例视频
用`gdown`工具从Google Drive下载测试视频。若未安装`gdown`,先通过pip安装:
```bash
pip install gdown
```
然后下载视频:
```bash
gdown "https://drive.google.com/uc?id=1rjBn8Fl1E_9d0EMVtL24S9aNQOJA veR5&confirm=t"
```
视频会保存到当前工作目录。
#### 运行YOLOv8目标检测+跟踪代码
执行带有DeepSORT跟踪功能的YOLOv8检测程序。指定模型(如`yolov8l.pt`)和视频源(`test3.mp4`),并设置`show=True`实时查看结果:
```bash
python predict.py model=yolov8l.pt source="test3.mp4" show=True
```
#### 下载更新后的`predict.py`文件以支持车辆计数
如需启用车辆计数功能,从以下链接下载更新版`predict.py`,并替换原文件:
- [更新的`predict.py`文件](https://drive.google.com/drive/folders/1awlzTGHBBAn)
确保将新文件放至`ultralytics/yolo/v8/detect`目录。
#### 运行YOLOv8目标检测+跟踪+车辆计数代码
再次运行修改后的脚本:
```bash
python predict.py model=yolov8l.pt source="test3.mp4" show=True
```
运行后,屏幕上会显示车辆检测、跟踪结果,同时程序会统计并显示视频中间出现的车辆总数。
> 注意:根据你的具体环境和需求,可能需要调整参数或路径。确保所有路径正确,且文件已放到指定位置。