论文标题: Orbit-Adaptive Zero-Shot Forecasting on Spatio-Temporal Graph
会议:KDD2026
作者:Yue Xu,Wenying Duan*, Xiaoxi He, Shuai Ma
单位:澳门大学、 南昌大学
代码:https://github.com/wenyingduan/OAGNN
论文:https://github.com/wenyingduan/OAGNN/blob/main/Orbit-Adaptive%20Zero-Shot%20Forecasting%20on%20Spatio-Temporal%20Graph.pdf
引言
时空图预测在交通流量、空气质量、公共健康和能源系统等领域已经被广泛应用。最近几年,像 AGCRN、Graph Wa veNet 这类节点自适应 STGNN,通过学习节点嵌入、自适应邻接矩阵和节点条件参数,确实把预测性能提升了不少。
不过,现有的跨领域时空图预测方法大多有一个前提假设:目标域至少存在少量标注数据,也就是 few-shot 迁移。但现实问题中更常见的情况是,目标域里没有任何历史时序观测——比如一个新城市刚部署交通传感器,还没来得及积累足够的历史流量数据;或者突发疫情初期,需要对新地区做传播趋势预测;再比如跨城市模型迁移,目标城市的节点集合和源城市完全不同。
在这种零样本设定下,传统方法的根本性缺陷就暴露出来了:非自适应模型(比如 DCRNN、STGCN)虽然可以直接部署,但全局共享参数没法捕捉节点异质性,处理不了不同节点之间的差异;而节点自适应模型(如 AGCRN、Graph Wa veNet)通过学习节点索引相关的嵌入来生成自适应邻接矩阵和节点参数,但这些嵌入和节点 ID 强绑定,在没有目标域时序数据时根本无法推断,因此零样本场景下完全不可用。
那么,有没有一种模型既能保留节点级自适应能力,又不需要目标域数据就能迁移?
核心洞察:图自同构轨道——结构角色决定时序行为
OA-GNN 的关键洞察在于:一个节点的时序动态不仅取决于自身的历史序列,更由其在图中的结构位置决定。
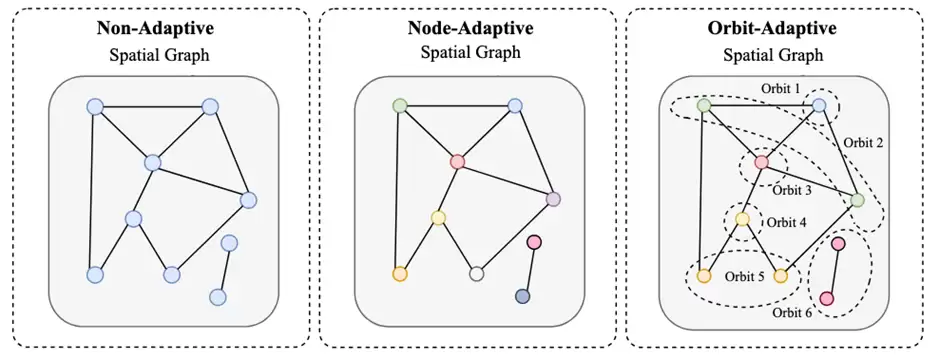
上图直观展示了三种参数化策略的根本区别:
非自适应:所有节点参数完全相同,无法处理节点级异质性;
节点自适应:每个节点拥有独立参数(依赖于节点ID),在零样本场景下因无法推断而失效;
轨道自适应:将同一自同构轨道(结构上对称的节点)的参数绑定,既保留了局部适应性,又使得参数可以随轨道迁移到全新的图。
作者利用图自同构轨道来形式化这一直觉。在图论中,自同构是一种保持图结构的节点置换。属于同一轨道的节点在结构上是对称的(即无法通过局部邻域区分),它们往往扮演相似的功能角色。例如,在交通网络中,所有高速公路入口匝道的节点可能属于同一轨道;在疫情网络中,所有枢纽城市的节点可能共享相似的结构特征。
更重要的是:这种结构角色的等价性在不同图之间具有迁移性。即使两个图的节点集合完全不同,只要它们的轨道结构相似,就可以共享预测机制。
基于这一洞察,OA-GNN 提出了轨道自适应机制:将节点级参数共享的范围从“每个节点单独学习”提升到“同一轨道内的节点共享自适应参数”。这样,模型不再依赖节点 ID 或目标域历史数据,而是仅从图拓扑中提取轨道信息,即可生成可迁移的预测参数。
OA-GNN框架
 OA-GNN
OA-GNN
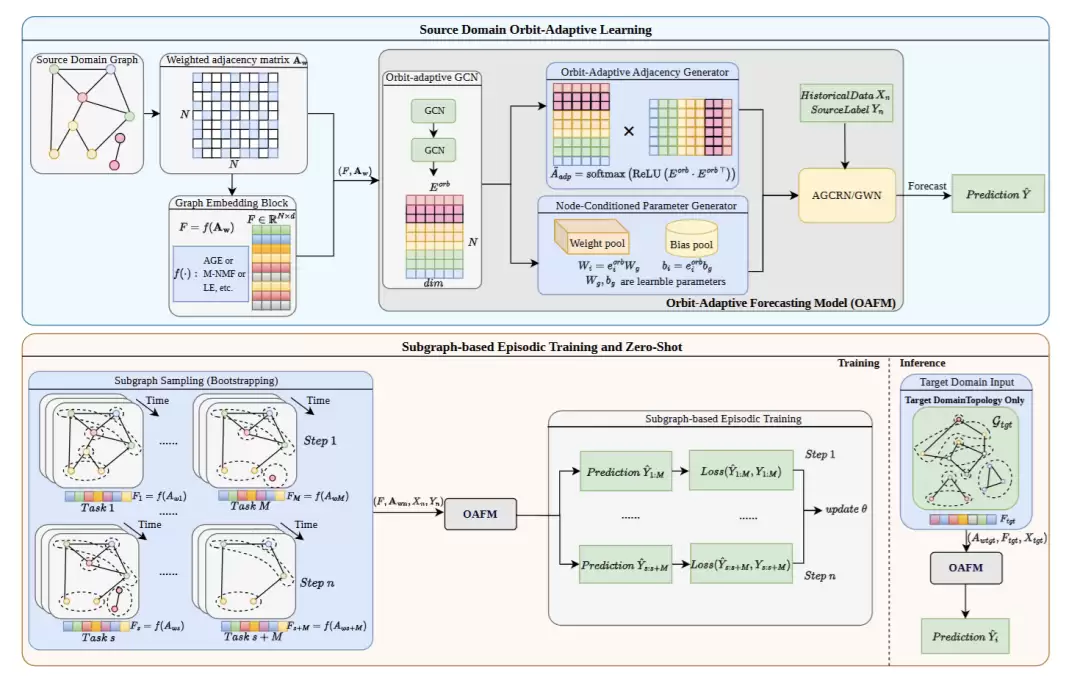
OA-GNN 的整体框架如上图所示,包含三个核心模块:
1. 拓扑驱动的节点特征提取
给定目标域图结构,首先通过结构嵌入方法(如 Laplacian Eigenmaps、M-NMF 或可学习的 AGE)生成纯拓扑驱动的节点特征,不依赖任何节点属性或时序数据。
2. 轨道自适应图卷积
利用拉普拉斯谱滤波器实现置换等变的 GCN,将拓扑特征映射为轨道自适应嵌入。该嵌入满足:同一自同构轨道内的节点获得相同(或等变)的表示;对不同图的节点自动对齐结构角色。
3. 轨道自适应参数生成
基于构建:
轨道自适应邻接矩阵
节点条件参数:每个节点的卷积参数由线性组合共享基得到
这些组件可直接插入现有 STGNN 主干(如 AGCRN、GWN)中,替换原有的节点索引相关参数,实现零样本迁移。
4. 子图情景训练
为了模拟跨域零样本场景,OA-GNN 在源域图上采样大量子图作为不同“任务”,每个子图对应一个虚拟目标域。模型在这些任务上训练,学会仅依据图结构进行自适应预测,从而在真实目标域上实现零样本泛化。
实验验证
作者在六个真实数据集上进行了评估,涵盖交通(PEMS04/07/08)、空气质量(Air Quality)、能源(PV-US)和疫情(Korea-COVID)等不同领域。
零样本迁移性能对比
以 PEMS04 为源域、其余为目标域,OA-GNN 显著优于非自适应零样本基线:
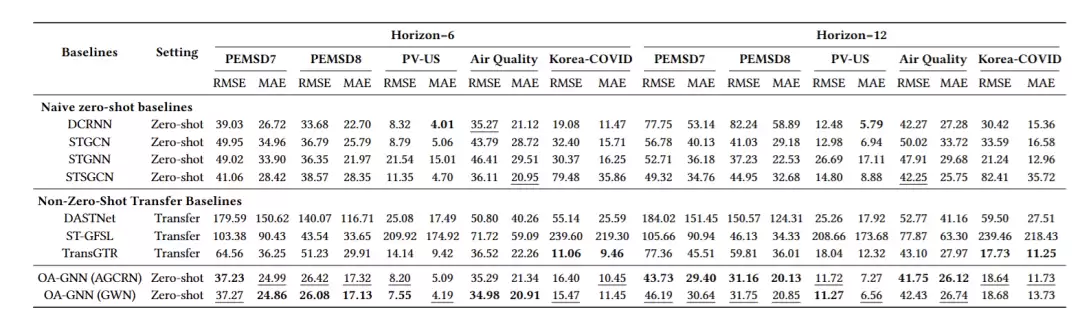
即使在源域为极小规模(Korea-COVID 仅 17 个节点)的极端设定下,OA-GNN 仍能在大型交通数据集上取得与需要目标域数据的 TransGTR 相当的结果,而后者使用了额外的目标域监督信号。
与有监督上界对比
当目标域有完整监督数据时,OA-GNN 的零样本性能与有监督上界的差距已相当有限。例如在 PEMS08 上,有监督 AGCRN 的 MAE 为 15.44,而零样本 OA-GNN 达到 20.13——仅用图拓扑就恢复了近70%的有监督性能。

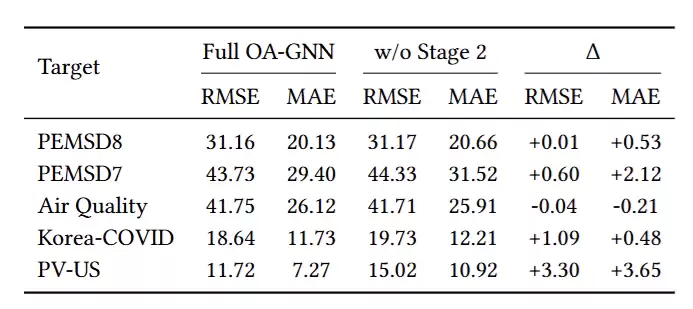
组件消融
移除子图情景训练:在 PV-US 上,MAE 从 7.27 恶化至 10.92(+50%),证明该策略对跨域泛化至关重要。
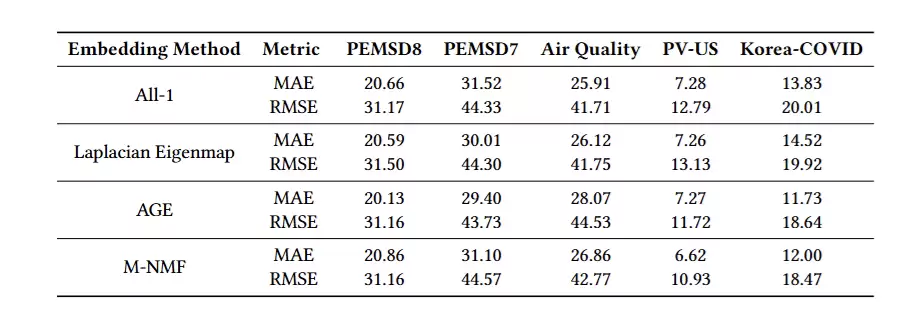
不同拓扑嵌入方法:M-NMF 和 AGE 均显著优于随机初始化基线,其中 AGE 在 PEMS08 上取得最佳 MAE (20.13)。
轨道自适应 vs 节点自适应:将AGCRN的节点索引嵌入替换为轨道自适应嵌入后,PEMS04 上MAE从19.83降至19.30,Korea-COVID 上从19.98 降至9.20。
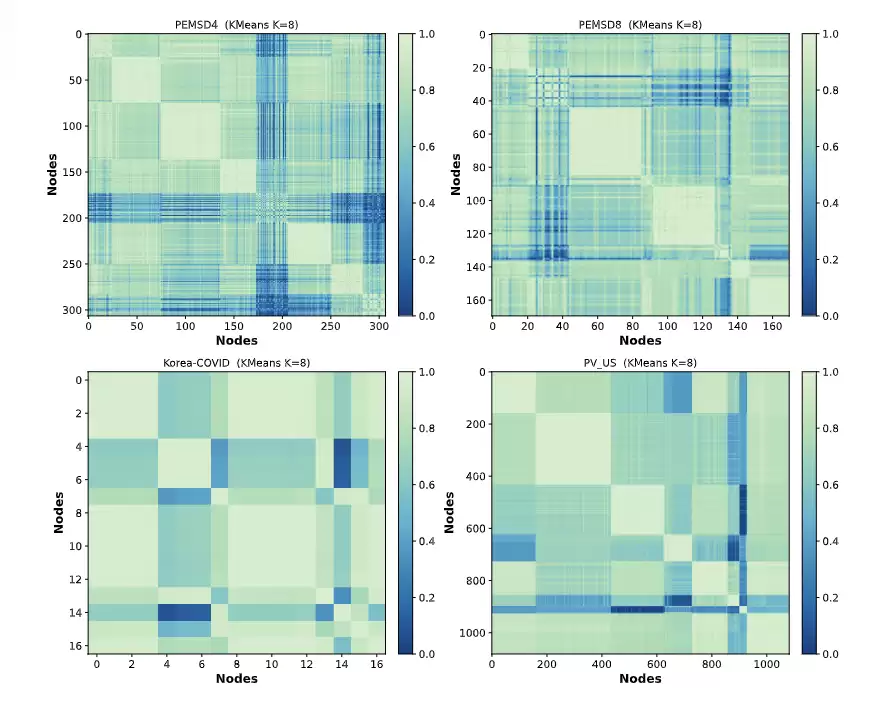
可视化分析
对节点嵌入进行 K-means 聚类(k=8)后发现:PEMS04/08 呈现复杂的分层结构,轨道丰富;Korea-COVID 结构简单,轨道数少;PV-US 结构模糊,空间依赖性弱。这解释了为什么 OA-GNN 在 PV-US 上增益相对较小——轨道自适应机制的有效性与图自身的结构复杂性正相关。
总结
本文提出的 OA-GNN 试图回答一个现实而重要的问题:在没有目标域时间序列和标签参与训练的情况下,时空图模型能否仅依靠目标图拓扑完成迁移?
OA-GNN 的答案是:可以,靠图自同构轨道。从节点自适应到轨道自适应——不记住节点 ID,只理解结构角色。零样本时空预测的新范式:让模型从“认识谁”转向“身在何处”。




