最近,来自同济大学与香港中文大学的一项联合研究成功入选ICRA 2026,通讯作者为王智鹏。论文预印本已在arXiv平台发布(编号:2602.10561v1),标题为Morphogenetic Assembly and Adaptive Control for Heterogeneous Modular Robots。这一成果令人眼前一亮,其核心价值在于解决了异构模块化机器人长期存在的痛点:每当形态改变,控制系统便需要重新设计。而本文给出的解决方案,可以用四个字概括——即插即动。
亮点速览
形态无关的“即插即用”控制:无论模块拼装出怎样奇特的机器人结构,系统都能即时赋予其运动能力,无需针对新形态重新训练或人工设计控制架构。换言之,当您将标准化模块像乐高一样随意组合后,机器人可自行“秒懂”如何行走与动作,工程师不再需要为每种新形态单独编写控制代码。
创新点
双层启发式重构规划器:针对大规模异构组装过程中状态空间爆炸的难题,研究团队提出了一套高低双层规划方案。高层采用带有“类型惩罚项”的双向启发式搜索(Greedy/Hungarian),生成模块搬运序列;底层则依靠A*搜索计算最优物理执行轨迹。通过这种设计,离散的配置规划与连续的动作执行得以巧妙解耦,既保障了规划效率,又未牺牲执行精度。
GPU加速的退火方差MPPI控制器:新形态机器人的控制向来是技术难点。本文引入的模型预测路径积分(MPPI)控制器,配合多级方差退火策略,在全局探索阶段使用大方差进行“广泛探索”,在局部收敛阶段采用小方差实现“精细调节”,通过动态平衡达到了形态无关的鲁棒控制。整个过程在GPU上并行加速,响应速度十分可观。
成果
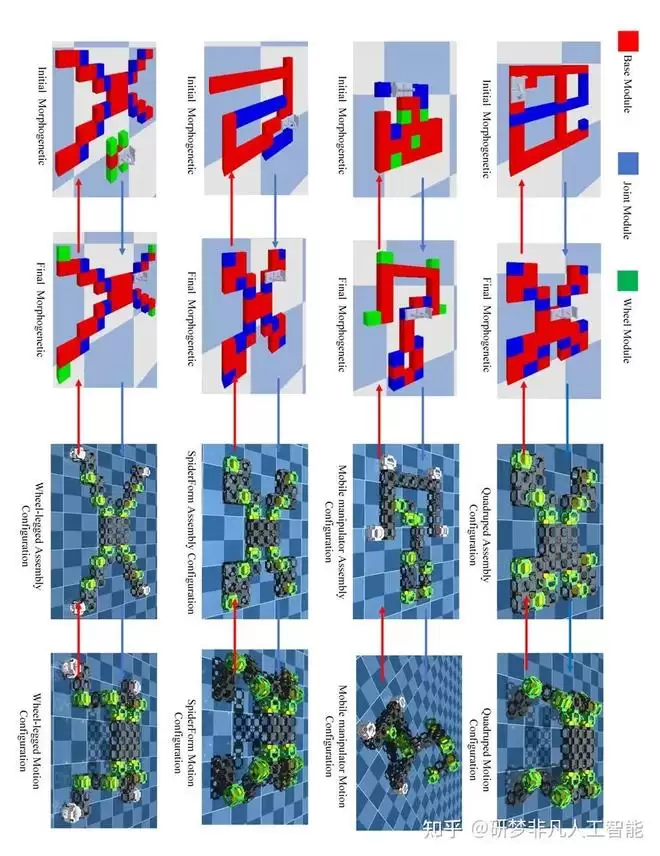
图3:异构模块化机器人的全生命周期闭环构建与控制。
(a)正向重构(蓝色箭头):系统根据任务需求,从标准化模块库中选取组件,由建造者机器人自动拼装出四足、移动机械臂、蜘蛛形或轮腿混合等多种全新物理形态,并立即赋予其自适应运动能力;(b)逆向重构(红色箭头):任务完成后,机器人可自主解体并将基础模块退回至初始工作区,实现硬件资源的高效循环利用与机器形态的动态演化。
从“感知触觉”到“形态破局”,拼好具身物理落地的最后拼图。回顾这篇ICRA 2026佳作,不难发现一个清晰趋势:具身智能的发展正在从纯粹的“大脑认知”向下延伸,深入到与物理世界交互的每一个神经末梢。模块化、自重构、即插即用——这些不再是实验室中的愿景,而是正在加速迈向真实落地的技术路径。




