来源:科技日报
科技日报记者 张佳欣
赋予机器超越人类的“火眼金睛”,是人工智能与计算机视觉领域的核心目标之一。近期,《自然·通讯》期刊发表了一项来自美国亚利桑那大学研究团队的重要突破:一种创新的3D成像技术,有望让机器视觉在复杂现实场景中实现“更快、更清晰”的感知,甚至达到“超人级”的三维视觉能力。这项技术的应用前景极为广阔,将深刻影响自动驾驶、机器人辅助手术、工业精密检测以及生物医学成像等多个关键领域。
人类天生拥有精密的双目立体视觉系统,但对于机器而言,实现同等甚至更优的3D感知却充满挑战。无论是自动驾驶车辆的导航系统,还是执行微创手术的机器人,其依赖的现有3D传感器在真实世界中常面临识别困境。尤其是面对镜面、玻璃、抛光金属等高反射物体时,传统设备极易产生误差。根本原因在于,多数现有技术能力单一:或擅长处理墙壁、布料等漫反射表面,或仅能应对镜面等高反射材质。然而,现实环境通常是混合的——例如,室内同时存在窗户、镜面家具与沙发、墙壁;手术中湿润的组织与器械表面也共存。面对此类混合反射场景,传统3D成像方案往往表现不佳。
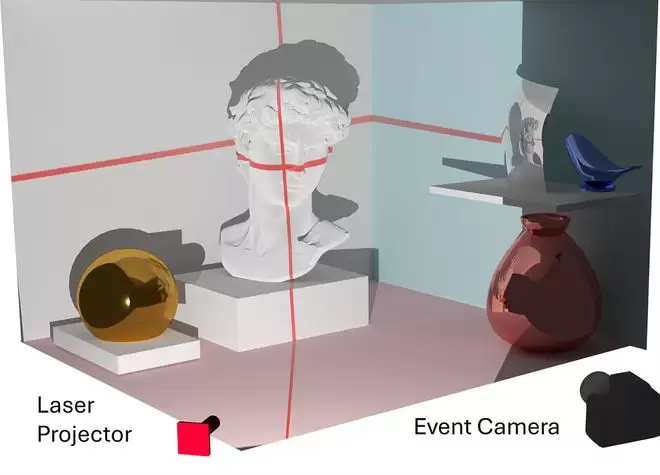
以往,为了精确测量如汽车车身等反光物体的三维形状,工程师常需搭建大型隧道状设备,用巨型屏幕环绕目标,通过分析屏幕上图案在物体表面的反射变形来推算形状。这项新研究则提出了一种更巧妙的思路。其技术基础是一种称为“偏折测量法”的经典方法,即通过观察已知图案在反光表面的变形来逆向计算物体形状。而本技术的革新之处在于“反其道而行之”:它摒弃了实体屏幕,转而将整个环境——如房间的墙壁、天花板、家具——转化为一块巨大的“虚拟显示屏”。
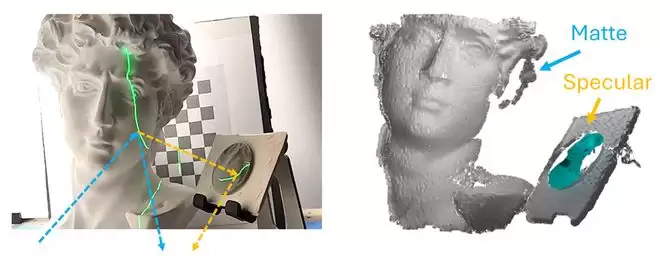
这一突破是如何实现的?研究团队首先利用激光扫描技术对整个房间进行高精度三维重建。随后,通过先进算法智能分析并区分场景中的漫反射区域与镜面反射区域。接下来,墙壁、家具、地板等原本不反光的漫反射区域被“征用”为有效的图案源,充当测量镜面物体形状的动态“显示屏”。这种方法彻底摆脱了对专用大型物理屏幕的依赖,极大地提升了系统的灵活性与部署便捷性。

为了进一步提升成像速度与场景适应能力,团队还集成了一种先进的“神经形态事件相机”。这种相机的工作原理与传统相机截然不同:它不像普通相机那样逐帧记录全部图像信息,而是异步地、仅捕捉场景中亮度发生变化的像素点。这种特性使其能够以极高的时间分辨率捕获动态3D信息,同时具备极高的动态范围,能在极亮或极暗的光照条件下稳定工作,从而克服了传统相机在运动模糊与光照适应方面的局限性。
目前,这项前沿技术仍处于实验室研发阶段。但研究人员强调,其核心原理具备出色的可扩展性与适应性。未来,该技术的应用尺度可能极为灵活,从微观的生物组织与微血管网络,到宏观的建筑物乃至工业部件,都能实现高精度、高速度的三维形貌测量。这无疑将为下一代自动驾驶系统、智能机器人平台以及高端医疗影像设备,装备上更可靠、更强大、更智能的“机器之眼”。




