推动机器人“进工厂”从概念走向实践,已成为当前具身智能产业发展的核心议题。近期,国家发展改革委在新闻发布会上明确提出,要加快具身智能训练基础设施建设,促进机器人在工业制造、商业服务及家庭场景中的规模化应用。与此同时,上海也设定了“十五五”末期实现10万台人形机器人进入工厂的明确目标。政策导向清晰地表明:机器人的真正价值,不仅在于技术展示,更在于其在实际生产环境中稳定、高效地完成作业任务。一场从“演示”到“实干”的产业落地浪潮,正在全面展开。
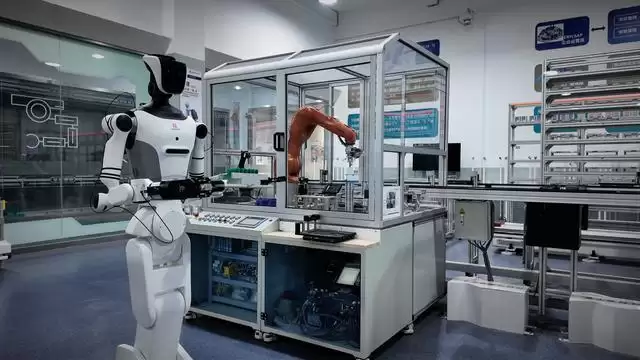
在政策利好的推动下,产业实践迅速跟进。政策发布后不久,一场在智能制造实训基地自动化产线上进行的真实作业,为“机器人实干”提供了有力例证。睿尔曼智能与公共实训基地合作,通过其GLN远程作业网络,指挥RealBOT轮式人形机器人完整执行了电路板上下料与搬运的全套工序。从精准识别定位到稳定抓取放置,机器人的每一个动作都严格匹配真实的工业生产节拍与物理交互要求。这已不再是预设程序的简单演示,而是对复杂、动态的真实生产环境的一次成功挑战。
自动化产线真实部署:实现电路板上下料搬运全流程闭环
如何界定机器人真正“进厂”?是局限于展厅的固定演示,还是能适应产线复杂多变工况的持续稳定作业?睿尔曼的此次实践给出了明确标准:真实环境部署、不依赖预设轨迹、具备批量化复制潜力,这三者共同构成了机器人真机落地的关键衡量维度。在此次部署中,机器人被直接放置在真实的工厂环境里,需要应对传送带速度变化、工件摆放位置偏差、夹取力度控制等工业现场常见的各类挑战。
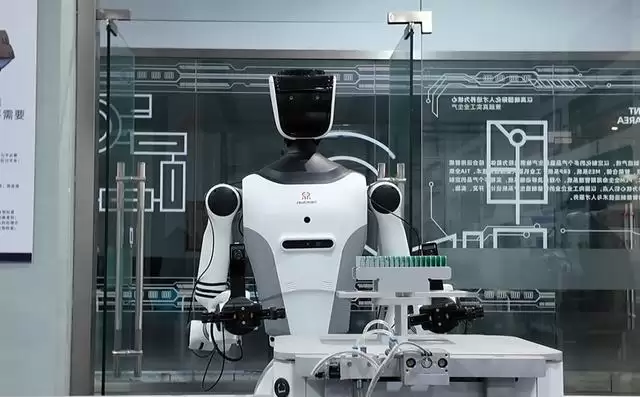
整个作业流程形成了一个高效的数据闭环。机器人通过集成的高精度视觉系统识别目标工件,完成精准抓取与放置。在此过程中产生的实时力觉数据、视觉信息与位置数据,被同步采集并回传至睿尔曼建设运营的常州具身智能数据实验平台。这些源自真实作业场景的海量数据,是训练更智能、更能适应复杂多变环境的具身智能模型的宝贵资源。
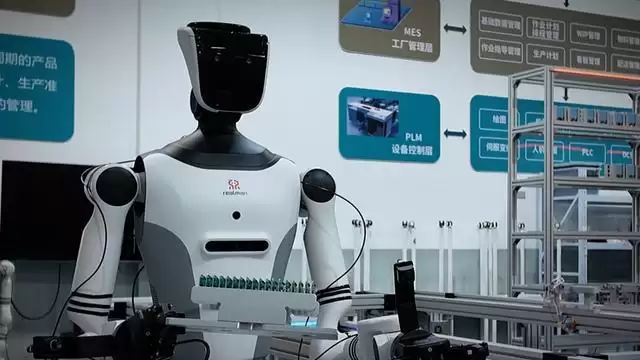
稳定作业的背后,离不开强大系统的支撑。睿尔曼的GLN远程作业网络发挥了核心作用,它如同一个高效、低延迟的“数字桥梁”,既能将人类操作员的经验实时映射给机器人,又能让机器人基于自身的环境感知与自主决策能力,在动态环境中保持作业稳定性。这种“远程遥操作指导”与“局部自主执行”相结合的模式,为机器人在非标准化、复杂工业场景下的广泛应用提供了切实可行的技术路径。
高质量数据的积累需要规模化的场景支撑。目前,常州具身智能数据实验平台已部署了超过150台RealBOT轮式人形机器人,覆盖了超过1000种真实作业任务。这些机器人分布在工厂产线、仓储物流等多个实体场景中持续运行,所产生的海量、多模态数据不仅驱动着自身技术的快速迭代,未来还计划向全球学术界与产业界开源开放,此举将有力加速整个具身智能领域的基础能力建设与协同创新。

百万级产能与50000小时无故障运行:确立规模化部署的“可靠性标杆”
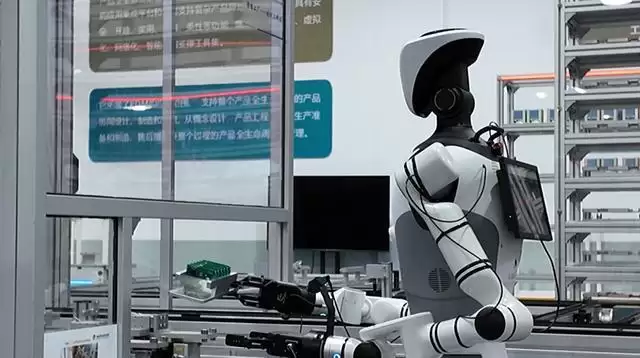
任何前沿技术的规模化推广,都必须跨越可靠性验证与量产能力两大关口。对于需要进入严苛工业环境的机器人而言,硬件可靠性是其生命线。睿尔曼通过全栈自研的一体化关节模组,已获得CR L3级别安全认证,其平均无故障运行时间达到50000小时。这一指标意味着什么?即使在7×24小时不间断运行的极端工业条件下,关节模组依然能保持极高的稳定性和超长使用寿命,这为机器人规模化、批量化部署奠定了坚实的硬件基础。

仅有可靠性还不够,快速、大规模的产品交付能力同样至关重要。睿尔曼AUTRON奥创产线的关节模组年产能已突破10万台,并正在向百万级规模迈进。市场是检验产品的最佳标准,目前全球已有超过8000家企业选择了睿尔曼的关节、机械臂或整机解决方案,应用领域广泛覆盖工业制造、智慧物流、医疗康复等多个行业。这些数据表明,睿尔曼的角色已超越传统硬件制造商,它正通过构建“高可靠硬件平台 + 真机场景数据闭环 + 远程作业网络”这三重核心底层能力,致力于打造一套支撑机器人产业规模化落地的新型基础设施。
随着“进工厂、进商场、进家庭”的政策导向日益清晰,以及各地方具体产业目标的明确,机器人规模化落地的战略窗口期已经到来。睿尔曼此次在公共实训基地的成功实践,不仅是一次关键的技术验证,更提供了一个具备高度可复制性与参考价值的“机器人进厂样板”。它清晰地预示,机器人正从实验室和展台上的前沿科技,加速转变为工业生产线上可靠、高效的“可调度智能劳动力”。这条发展之路,关乎技术如何深度理解并融入真实的物理世界,更关乎机器人技术赋能百业、服务社会的终极愿景如何逐步成为现实。




