如果说机器人的“身体”决定了其行动范围与操作能力,那么它的“大脑”则决定了其智能水平与适应能力。近日,成都人形机器人创新中心公布了一项关键突破,发布了中国首个基于流形拓扑保持的机器人世界模型(MTPR-WM)。这相当于为机器人构建了一个全新的、更接近人类认知模式的核心决策中枢。
该模型的核心目标非常明确:为机器人打造一个能够深刻理解物理世界内在关联、空间结构与运行法则的高效“智能内核”。其重要意义在于,使机器人摆脱传统AI模型那种基于像素的表层感知方式,首次获得一种近似人类的“空间直觉”与物理推理能力。这意味着,在复杂多变且动态的真实环境中,机器人的决策过程将更加迅速,行动也将更为安全可靠。
那么,为何要投入大量资源研发“世界模型”呢?这需要从当前主流技术面临的瓶颈谈起。传统基于生成式架构的具身智能模型(例如视觉-语言-动作模型,VLA)存在一个业界公认的挑战——“模型幻觉问题”。这类似于大型语言模型,对同一指令的响应可能每次都不相同,存在显著的不确定性。当将这类模型用于控制机器人执行实际任务时,其输出的不可预测性,使得保障人、机、环境三者的安全成为巨大难题。
破局的关键,在于思维范式的转换:从“生成”转向“预测”。与生成式模型凭空合成数据不同,世界模型的工作原理是,让机器人通过执行动作来与环境及物体互动,并据此“预测”未来环境与物体会演变成何种状态,而非直接“生成”一个状态。正因为其结果基于物理规律推导得出,所以具有高度的“确定性”,而这种确定性,正是机器人获得“泛化能力”——即举一反三、应对未知场景能力——的基石。可以说,世界模型这种对物理世界进行理解与预测的全新架构,是目前推动人形机器人技术走向成熟最可行的技术路径。
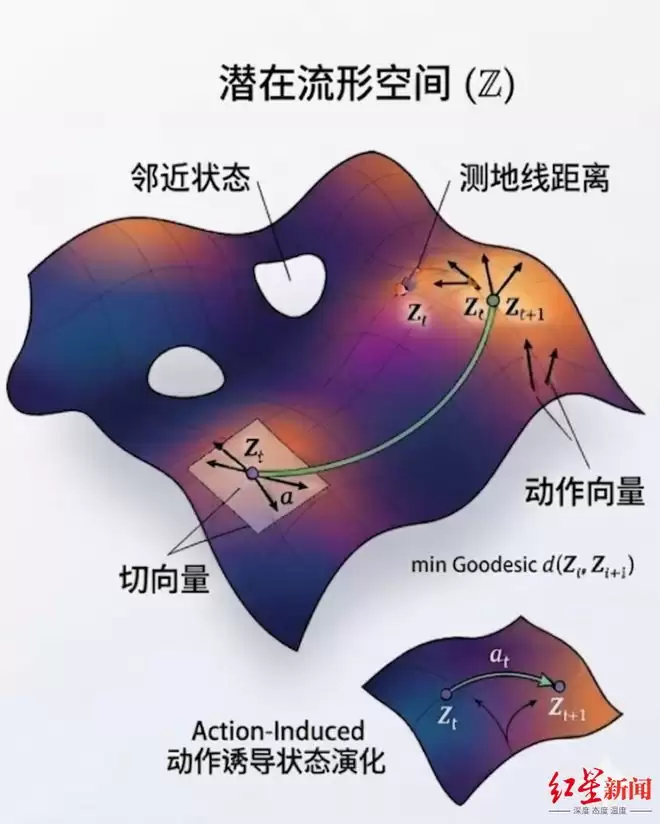
流形拓扑保持原理示意图
具体到此次发布的新模型,其核心技术在于“流形拓扑保持”。简而言之,流形理论能帮助我们将高维、复杂的物理世界状态,映射到低维空间中进行高效编码与计算。成都人形机器人创新中心作为国内最早投身机器人世界模型研发的团队之一,此前已于2025年8月发布了中国首个基于世界模型的机器人任务执行系统(R-WMES)。此次推出的新模型,正是该技术路线的深化与演进。
它的核心原理是确保机器人在抽象的隐空间中进行路径与行为规划时,其每一步决策与动作都严格遵循自然界的物理定律。这从根本上规避了VLA等架构可能引发的物理碰撞、物体穿透或空间重叠等违背物理常识的问题。可以说,这是为机器人的“思考”过程施加了物理规律的“硬约束”。
其中,对空间占据关系的精准数学描述,是世界模型具备物理真实性的基石。在此框架下,机器人不仅能感知到“前方存在一个障碍物”,更能理解物体边界如何随时间平滑、连续地演变。这种对空间结构本质的深刻洞察,赋予了机器人真正的物理泛化能力。随着几何深度学习等前沿领域的持续进展,这种基于流形理论的“智能大脑”,将成为推动具身智能体从简单的“感知执行器”蜕变为真正的“物理智能体”的核心引擎。
所有技术发展的最终目的都是为了落地与应用。推动机器人核心技术的突破,并加速其在各类机器人平台上的集成与应用,让机器人变得更加智能、可靠,从而真正融入生产与生活场景,这正是整个产业前进的明确方向。




