用于辅助技术的脑机接口
脑机接口技术,作为连接大脑与外部设备(如计算机、机械臂)的直接通信桥梁,长期以来被视为革命性的辅助科技。尤其在帮助瘫痪患者恢复与外界互动能力——例如操控物体、进行交流或完成日常活动——方面,其应用前景极为广阔。然而,一个关键挑战依然存在:实验室中高度可控的演示成果,与能够在真实、动态生活场景中稳定运行的实用化系统之间,仍有显著差距。
回顾发展历程,皮层内脑机接口(即直接植入大脑皮层的设备)的研究已进行多年。无论是非人灵长类动物还是人类志愿者,都已成功利用这类系统控制电脑光标、驱动机械臂、操作仿生假肢甚至电动轮椅,亦有研究助力失语患者重建沟通渠道。但现实世界的自主移动,环境复杂多变,充满不确定性。传统的脑机接口方案在此方面往往表现局限:有的仍需使用者残留的肢体动作作为辅助输入,有的则只能在结构简单、预先设定的环境中工作,缺乏应对突发状况的灵活性与鲁棒性。
正如本研究团队所指出的:“既往专注于运动控制的脑机接口研究,大多在实验室范式下集中于光标或机械臂的操控。这种相对单一的应用焦点,在一定程度上延缓了技术向轮椅导航等真实世界任务的转化。实际上,现实中的自主移动需要根据环境变化进行实时、灵活的路径调整与避障。这种高阶运动控制能力,很可能依赖于运动前区与初级运动皮层等多个脑区的协同神经编码。”
三只猴子、一个球体与一片虚拟森林
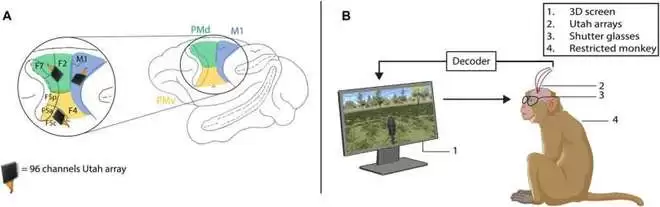
如何突破这一瓶颈?研究人员构思了一套创新的实验系统。他们将微电极阵列精准植入三只恒河猴大脑中与运动规划及执行相关的三个关键区域:初级运动皮层(M1)、背侧运动前区(PMd)以及腹侧运动前区(PMv)。这些电极持续采集神经信号,随后由先进的人工智能算法进行实时解码,最终用于操控虚拟现实环境中的一个虚拟化身。该VR环境具备立体视觉,其模拟场景的复杂度和不可预测性会循序渐进地增加,以逼近真实世界的挑战。尤为重要的是,系统中的AI解码模型仅需一个简短的校准学习阶段,之后便可稳定运行,无需针对每个任务进行重复训练。
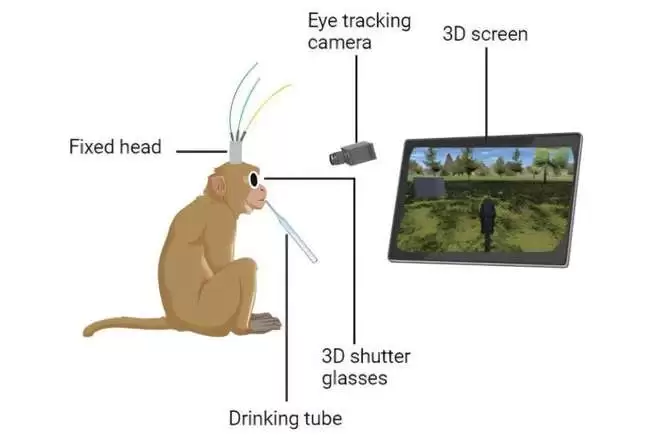
实验设计兼具巧思与深度。一部分任务要求猴子学习在二维屏幕上移动一个球体目标;另一部分任务则更具沉浸感——猴子以第一人称视角,在模拟的三维森林场景中导航其虚拟化身。核心突破在于:猴子在整个过程中只需注视屏幕上的视觉反馈(被动观察),而后完全依靠自身的大脑神经活动,便能成功完成多种模式、不同场景的移动控制任务。

研究团队阐释了其系统的工作机制:“通过将来自初级运动皮层、背侧及腹侧运动前区的神经信号,实时解码为连续的速度控制指令,我们的系统实现了对一系列复杂任务的精准操控。这包括从中心点向外围导航、灵活避开动态障碍物、实时切换追踪目标,以及在视觉丰富的场景中完成第一人称与第三人称视角下的连续运动——所有这些,都是为了模拟现实行动中遇到的真实挑战。”
“与以往主要聚焦于二维光标控制、机械臂定点操作,或在平面显示器上沿预设路径进行一维运动的研究范式不同,”作者们强调,“我们的虚拟现实平台,其核心目标是模拟现实挑战:快速的任务上下文切换、跨不同空间与视觉场景的泛化能力,以及最关键的一项——无需任何实际肢体运动或本体感觉反馈,即可实现的纯意念控制。”
实验结果令人鼓舞。数据表明,猴子们仅凭大脑发出的神经信号,在身体保持静止的情况下,就能精确控制其在三维虚拟环境中的运动轨迹。更为重要的是,它们在多次试验中表现出清晰的学习效应,操作熟练度与成功率持续提升。另一个关键发现是,与初级运动皮层相比,运动前区(包括PMv和PMd)为导航控制提供了信息量更丰富、更有效的神经信号源。整个系统在不同任务与环境中展现了出色的通用性与适应性,无需针对每个新条件重新校准,显示出强大的泛化性能。
从猴子虚拟现实实验到改善生活质量
尽管未来仍需攻克最终的人体临床试验等难关,但研究团队确信,这套新型脑机接口系统为提升瘫痪患者的独立生活能力与行动自由度,迈出了坚实而关键的一步。它不仅证实了大脑具备学习和适应虚拟环境中复杂任务控制的巨大潜力,也进一步明确了背侧与腹侧运动前区在实现高级、灵活运动控制的脑机接口中扮演的核心角色。
研究人员总结道:“综上所述,我们开发的这套皮层内脑机接口系统,整合了多项关键性能,使其特别适用于辅助瘫痪患者应对日常生活场景。它能实现快速、精准的连续运动控制——这对操控电动轮椅等任务至关重要。系统能够无缝适应目标位置的动态变化,成功执行避障操作,这些都是在类似家庭这样复杂、杂乱的环境中实现自主移动所必需的核心功能。同时,它还能迅速响应用户意图的实时改变。” 这意味着,一个更自然、更智能、更贴近真实生活需求的辅助技术解决方案,正逐渐从蓝图走向现实。




