模仿学习赋能灵巧操作:从理论到落地的全景解读
想让机器人像人一样灵巧地抓取、旋拧、插拔?传统基于模型的方法在复杂接触动力学面前常常力不从心,而纯强化学习又受困于高昂的试错成本。那么,有没有一条更高效的路径?答案是肯定的——模仿学习正成为破解灵巧操作难题的关键钥匙。它绕开了复杂的显式建模和繁琐的奖励设计,直接从人类示范中学习精细的协调策略。
不过,这个领域的研究长期分散,数据、算法、硬件平台各异,缺乏系统性梳理。近期,一篇由天津大学、山东大学、KTH、ETH、MIT、上海交通大学、南方科技大学、北京通用人工智能研究院及中科院自动化所等机构学者联合撰写的综述论文《Dexterous Manipulation through Imitation Learning: A Survey》首次进行了全景式整合。该论文涵盖了2024-2025年的关键进展,为研究者提供了该领域的完整视图。

论文标题:Dexterous Manipulation Through Imitation Learning: A Survey
论文链接:https://ieeexplore.ieee.org/document/11305224/
这篇综述清晰地指出,模仿学习的核心优势在于其数据驱动的本质,但它的成功绝非易事,需要高质量数据、适配算法、可靠硬件与标准化评估四者协同发力,缺一不可。
理论支撑
从认知科学到优化理论的跨学科根基
模仿学习在灵巧操作中的有效性,背后有着坚实的跨学科理论支撑。这并非偶然的经验发现。在认知层面,Bandura的社会学习理论为“观察-模仿”这一行为范式提供了经典解释,而灵长类动物大脑中镜像神经元的发现,则从神经机制上揭示了动作观察与执行共享表征的生物学基础。
到了控制层面,事情变得更加可计算。内部模型理论与最优反馈控制框架,为策略的预测与校正闭环提供了精密的数学工具。例如,动态运动基元(DMP)通过微分方程参数化人类示范轨迹,实现了对运动的紧凑表征和灵活泛化。
而在优化层面,各种模仿学习算法都有其统计学习的理论保证。无论是行为克隆的负对数似然目标、逆强化学习的特征匹配约束,还是对抗模仿中的散度最小化,都为算法的收敛性和样本效率分析奠定了基石。这意味着,模仿学习不仅是“黑箱”技巧,更是一门有理论深度的科学。
数据资源
从遥操作到互联网规模弱监督
巧妇难为无米之炊,高质量示范数据是模仿学习的生命线。早期研究严重依赖高精度的遥操作或动作捕捉系统,像BridgeData V2、RH20T这类数据集,提供了多模态同步记录,但成本高昂,规模有限。
近年来,数据获取范式正在发生根本性转变,朝着更可扩展的方向演进:
高保真几何建模: 例如ARCTIC数据集,通过重建手与物体的精细网格,实现了对复杂交互几何的精确捕捉。
双手协同标注: 像OAKINK2这样的数据集,专注于双人操作场景,提供多视角3D姿态标注,为学习对称或非对称的协同任务铺平道路。
合成与增强技术: MimicGen等方法,利用几何与语义的一致性约束,能够从少量真实演示中生成大量物理合理的合成轨迹;RoboAgent则通过视频语义理解来扩展动作的多样性。
弱监督视频学习: 这或许是未来最具潜力的方向。VideoDex、NIL等方法尝试直接从互联网海量的未标注操作视频中提取策略,推动灵巧操作向无监督学习迈进,极大地降低了数据获取门槛。
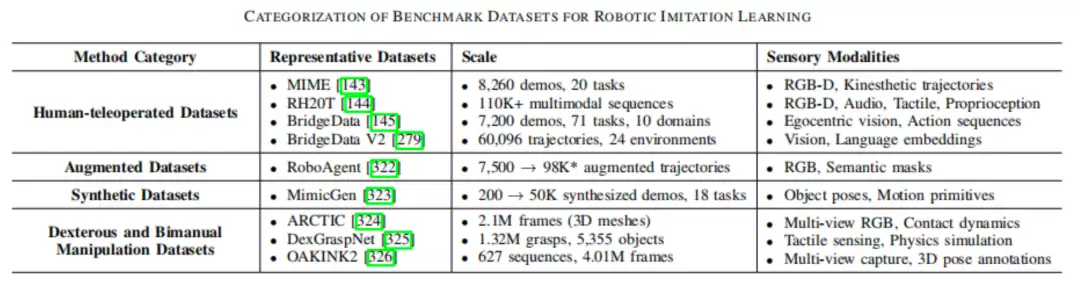
主流灵巧操作数据集对比

模仿学习数据集质量评估规则
学习方法
行为克隆的演进与多模态融合
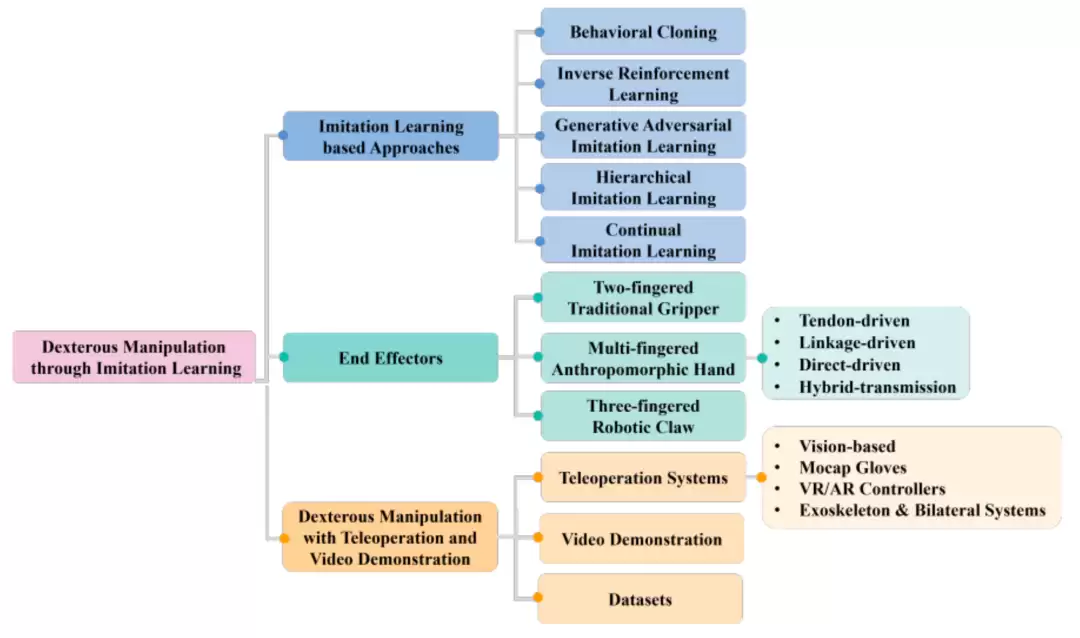
模仿学习的算法版图正在快速扩张和深化,核心进展体现在以下几个层面:
行为克隆的进化: 传统行为克隆容易受复合偏差影响。新一代方法如隐式行为克隆,通过能量模型来捕捉动作分布的多模态特性;而扩散策略(Diffusion Policy)则利用扩散模型的迭代去噪机制,能更好地建模高维连续动作序列中的多峰分布和时序依赖,在插拔、旋拧等复杂任务中表现尤为出色。
对抗模仿的鲁棒性提升: 像GA-GAIL这样的工作,通过引入任务目标来引导判别器的训练,增强了对噪声数据或次优示范的鲁棒性,让学习过程更加稳定。
视频驱动学习的四条路径: 根据技术路线,可分为运动中心建模(如DexMV)、合成视频生成(如Gen2Act)、表征学习(如Ag2Manip)和任务定制架构(如Bi-KVIL)四类。其中,Bi-KVIL通过显式建模双手协调关系,显著提升了在复杂环境中复现任务的能力。
触觉-视觉的深度融合: 触觉感知是突破视觉局限的关键。新一代高分辨率触觉传感器(如GelSight、TacTip)能提供丰富的接触力、微滑移信息,尤其在视觉被遮挡时成为不可或缺的冗余感知通道。ViTacFormer、KineDex等工作成功实现了跨模态特征融合,使得策略在低光照或局部遮挡条件下依然能稳定执行。
模仿学习方法分类体系
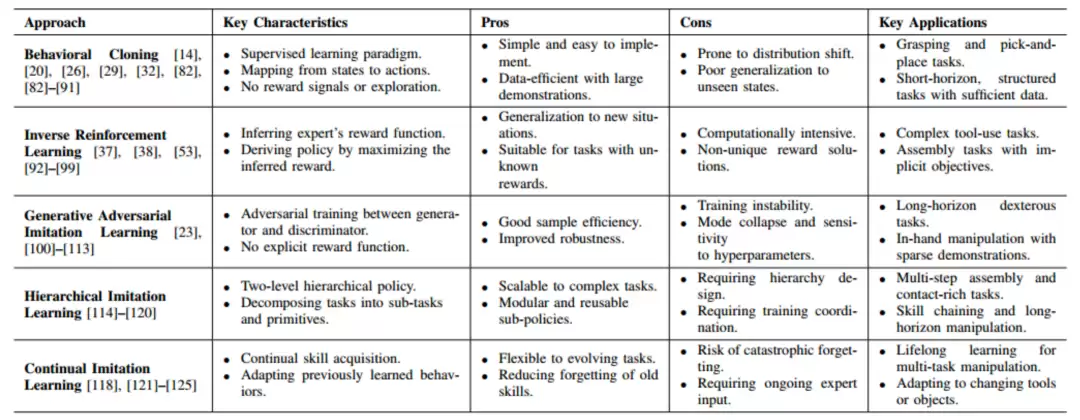
不同模仿学习方法的比较
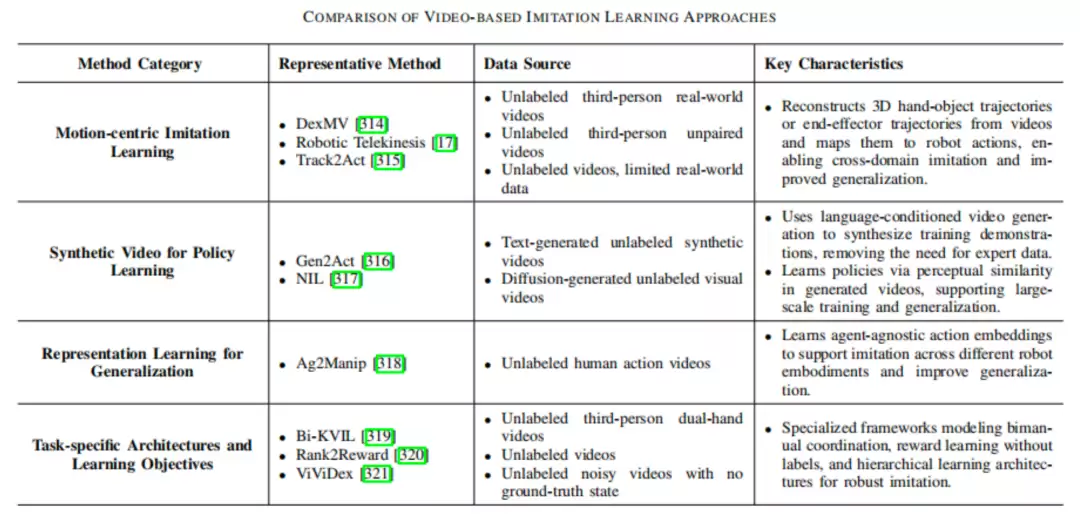
基于视频的灵巧操作模仿学习方法分类
硬件平台
从灵巧手到人形本体
算法再好,最终也要在物理硬件上跑起来。当前,灵巧手的设计呈现出一个清晰趋势:从高成本、封闭的工业系统,转向低成本、开源和模块化的研究平台。
Shadow Dexterous Hand以其24个自由度和高精度力控,长期被视为高保真遥操作的“黄金标准”。LEAP Hand则凭借简易的制造工艺和良好的运动性能,成为大规模模仿学习实验的常用选择。Linker Hand L20采用连杆驱动设计,指尖力和工作空间接近人手,在学术和工业研究中应用广泛。Allegro Hand的直接驱动方式带来了紧凑的结构和快速响应。BarrettHand通过欠驱动实现自适应抓取,在工业场景中久经考验。而DLR/HIT Hand II等早期平台,则为多指力控与传感集成提供了宝贵经验。
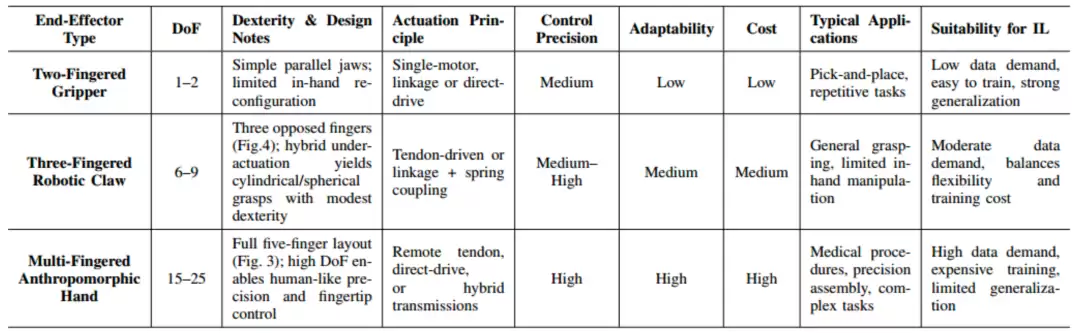
三种末端执行器在灵巧操作中的性能比较
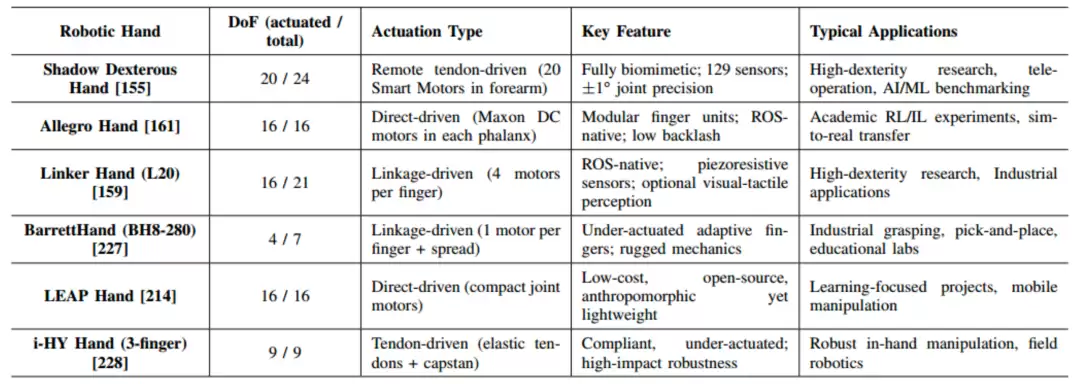
代表性机器人手的关键特征
然而,策略的部署效能不仅取决于灵巧手,更与整个机器人本体构型息息相关。这里存在一个有趣的权衡:高自由度的人形平台(如配备Shadow Hand的双臂系统)能完美复现精细的手指运动,但激增的动作空间维度会加剧模仿学习中的分布偏移风险;反之,轻量化本体(如LEAP Hand搭配移动底座)通过简化结构降低了学习难度,却可能牺牲执行复杂任务的能力。
更关键的是,本体动力学特性——如关节摩擦、传动迟滞、质量分布——会在示范数据与真实执行之间引入系统误差。这就要求策略设计必须通盘考虑“感知-决策-执行”整个链路的端到端鲁棒性。近期像Mobile ALOHA这样的工作,通过全身遥操作采集协同数据,正是为了弥合“手部精细策略”与“全身协调运动”之间的鸿沟。
灵巧操作操作系统
算法落地的工程接口
这里的“操作系统”,指的是支撑策略执行的基础软件栈与任务调度框架,是连接算法与硬件的工程桥梁。论文指出,分层模仿学习框架需要通过高层任务分解与底层动作执行的解耦,来实现长时序任务的稳定复现。而遥操作数据采集系统,则极度依赖ROS原生接口、精确的多传感器时间同步协议以及低延迟通信中间件,以确保采集到的示范轨迹具有高度的时空一致性。
此外,为了解决“你的代码在我这儿跑不通”这一老大难问题,综述强烈呼吁社区共建标准化的部署环境。这包括统一的仿真参数配置、硬件抽象层接口以及评估指标注册表,旨在缩小“代码可运行”与“结果可复现”之间的巨大差距。
评估协议
标准化 benchmark 的迫切需求
当前灵巧操作领域的评估现状,可以说是“各自为政”。大多数研究都在私有的任务或特定的硬件平台上进行验证,导致任务定义(比如成功与否的判定阈值)、评价指标(是用轨迹误差还是任务完成率?)、硬件依赖(是否要求特定型号的灵巧手?)都缺乏统一标准。这种局面使得跨方法、跨平台的公平比较变得异常困难。
因此,建立社区公认的标准化测试基准(benchmark)已成为当务之急。这样的基准应涵盖插拔、旋拧、穿线、布料操作等典型任务,并引入物理可行性、能耗效率、失败恢复能力等综合指标,全面衡量系统的性能。
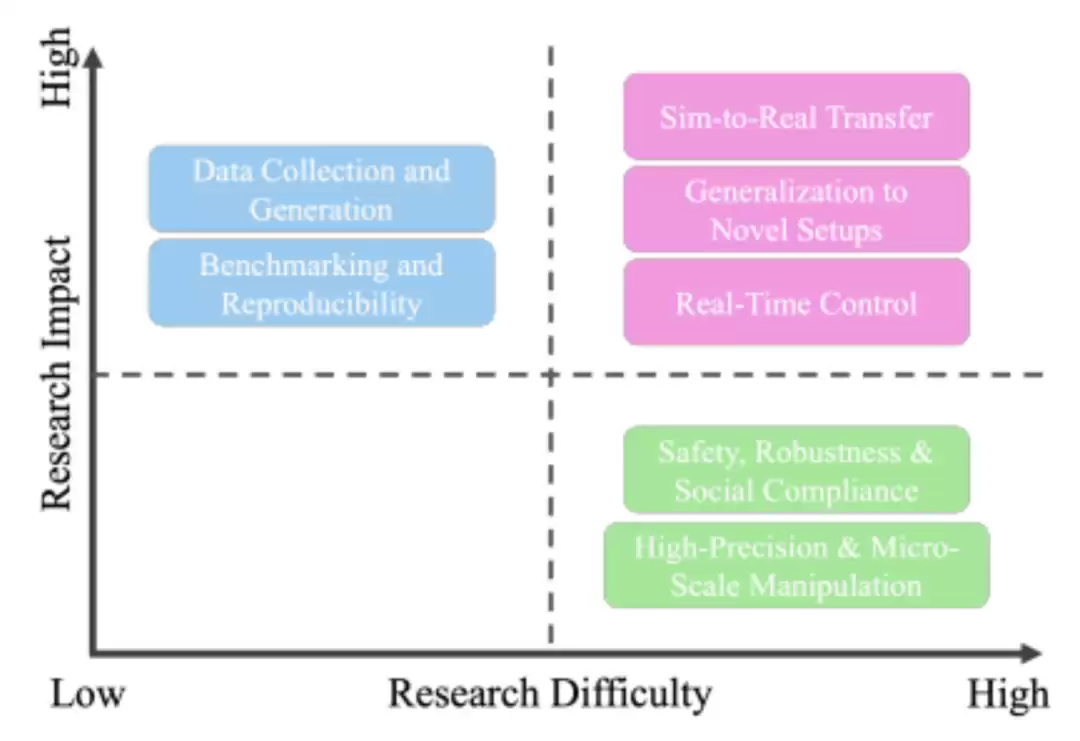
灵巧操作关键挑战的重要性与解决难度矩阵
总结与展望
这篇综述不仅提供了一份详尽的技术地图,更清晰地指出了未来的航向。算法层面,需要降低对特定硬件和环境的依赖,提升跨平台迁移能力。评估体系亟需标准化,以支撑公平、可比较的研究进展。而研究重心,正从单一、短时的任务,转向长期的交互与多技能的组合,这要求未来的系统必须具备分层规划、在线适应和技能组合的能力。
归根结底,灵巧操作的价值在于赋能具身智能体完成复杂的物理交互。从家庭服务到精密工业装配,拥有类人灵巧性的机器人将极大拓展人工智能的应用边界。这篇综述,正是为奔赴在这一前沿领域的研究者们,绘制的一幅清晰、系统且面向未来的全景图谱。