近期,OpenClaw开源项目在全网掀起现象级热潮,“养龙虾”式的创新AI交互玩法快速破圈,点燃了开发者与科技爱好者的热情。
从目前的发展情况来看,围绕OpenClaw的探索,仍主要集中在数字世界,例如文档处理、数据整理等典型任务。而能够延伸至真实物理环境、完成实体交互的产品,仍然较为少见。
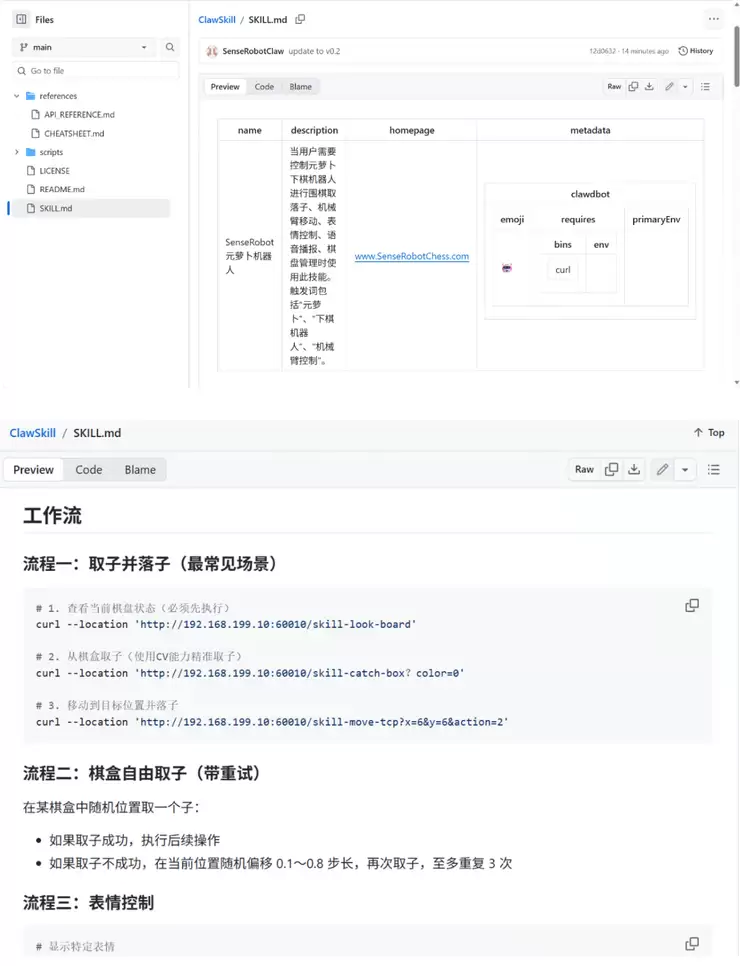
在这样的背景下,具备“实体交互”能力的产品开始受到关注。其中,商汤科技旗下的元萝卜,因开放了OpenClaw skill接口,被开发者尝试用于探索AI在真实世界中的执行能力。
GitHub:https://github.com/SenseRobotClaw/ClawSkill
ClawHub:https://clawhub.ai/SenseRobotClawBot/senserobot
依托其视觉感知与实体交互能力,元萝卜被部分业内人士视为少数同时实现量产落地、并具备实体交互能力的代表性产品之一。这也让业内开始重新审视元萝卜的角色——它是否有机会从“下棋机器人”,延展为更具通用能力的“桌面智能体”。
在前几日举办的2026年中国家电及消费电子博览会(AWE)期间,结合OpenClaw的设想,已经勾勒出元萝卜潜在的路径可能:通过简单指令驱动机械臂完成抓取、摆放,甚至让棋子组合成特定图形。除此之外,还有机会进一步延展至桌面自动化、互动展示或AI实验等场景,使AI从“生成内容”走向“参与动作”,改变物理世界,让用户的奇思妙想得以实现。
 突破虚拟与现实壁垒,视觉感知+机械臂让OpenClaw落地桌面场景
突破虚拟与现实壁垒,视觉感知+机械臂让OpenClaw落地桌面场景
当前,大模型能力快速飞跃、智能体功能不断进化,但绝大多数AI应用仍局限于屏幕内的虚拟交互,难以与真实物理世界开展交互。
元萝卜恰好具备实现物理世界交互的基础——依托商汤科技在计算机视觉领域的深厚积累,通过高精度摄像头与AI算法的配合,它能够实时感知桌面环境、识别物体位置、判断空间关系,做出智能决策,并引导机械臂安全完成实体交互。
这使得OpenClaw与元萝卜的结合与多数仍停留在屏幕内的AI应用不同:虚拟指令能够转化为真实动作,实现从“指令-感知-决策-执行”的完整闭环。借助元萝卜成熟的硬件能力,AI可以从识别物体位置,到完成抓取和摆放,真正从“虚拟交互”跨越到“物理执行”。这使元萝卜在OpenClaw生态中成为可执行实体动作的家用终端,为展示AI在真实物理环境中的应用提供了实例。
从“专用”到“通用”,“AI下棋机器人”进化为“桌面智能体”
此次与OpenClaw的深度融合,展现了元萝卜从“会下棋的机器人”向“桌面智能体”进化的潜力。
开发者、学生、创客以及科技爱好者可利用OpenClaw的自然语言交互能力,探索元萝卜在真实环境中的操作可能,在下棋功能之外,还有教育、编程、创客项目、AI实验或互动展示等场景。这条“开发者主导、生态驱动”的探索路径,为家用AI设备的应用边界提供了新的参考。
 未来,随着机器人走向更多应用场景,以及开源生态的不断完善,AI智能体将进一步打破虚拟与现实的边界,从屏幕走向更广阔的真实物理场景。而像元萝卜下棋机器人这样的消费级家用终端,作为AI能力触达普通用户的载体,也将在开源生态的支撑下,解锁更多元的应用场景,带来兼具温度与想象力的智能体验。
未来,随着机器人走向更多应用场景,以及开源生态的不断完善,AI智能体将进一步打破虚拟与现实的边界,从屏幕走向更广阔的真实物理场景。而像元萝卜下棋机器人这样的消费级家用终端,作为AI能力触达普通用户的载体,也将在开源生态的支撑下,解锁更多元的应用场景,带来兼具温度与想象力的智能体验。




