智源研究院正式发布了新一代具身智能基础模型——RoboBrain2.5,旨在攻克具身智能长期面临的两大核心挑战:“空间感知不准”与“执行过程不稳”。该模型依托大规模、高精度的时空联合监督训练,在真实物理世界交互能力上实现了双重关键突破:
- 高保真3D空间推理:将二维视觉输入精准映射至真实尺度下的可执行运动轨迹,显著提升机器人操作的定位精度与动作稳定性,真正实现“抓得准、放得稳”;
- 细粒度时序价值评估:在任务执行过程中持续建模状态进展与潜在风险,支撑长周期、强动态场景下的自主决策调整与闭环容错恢复。
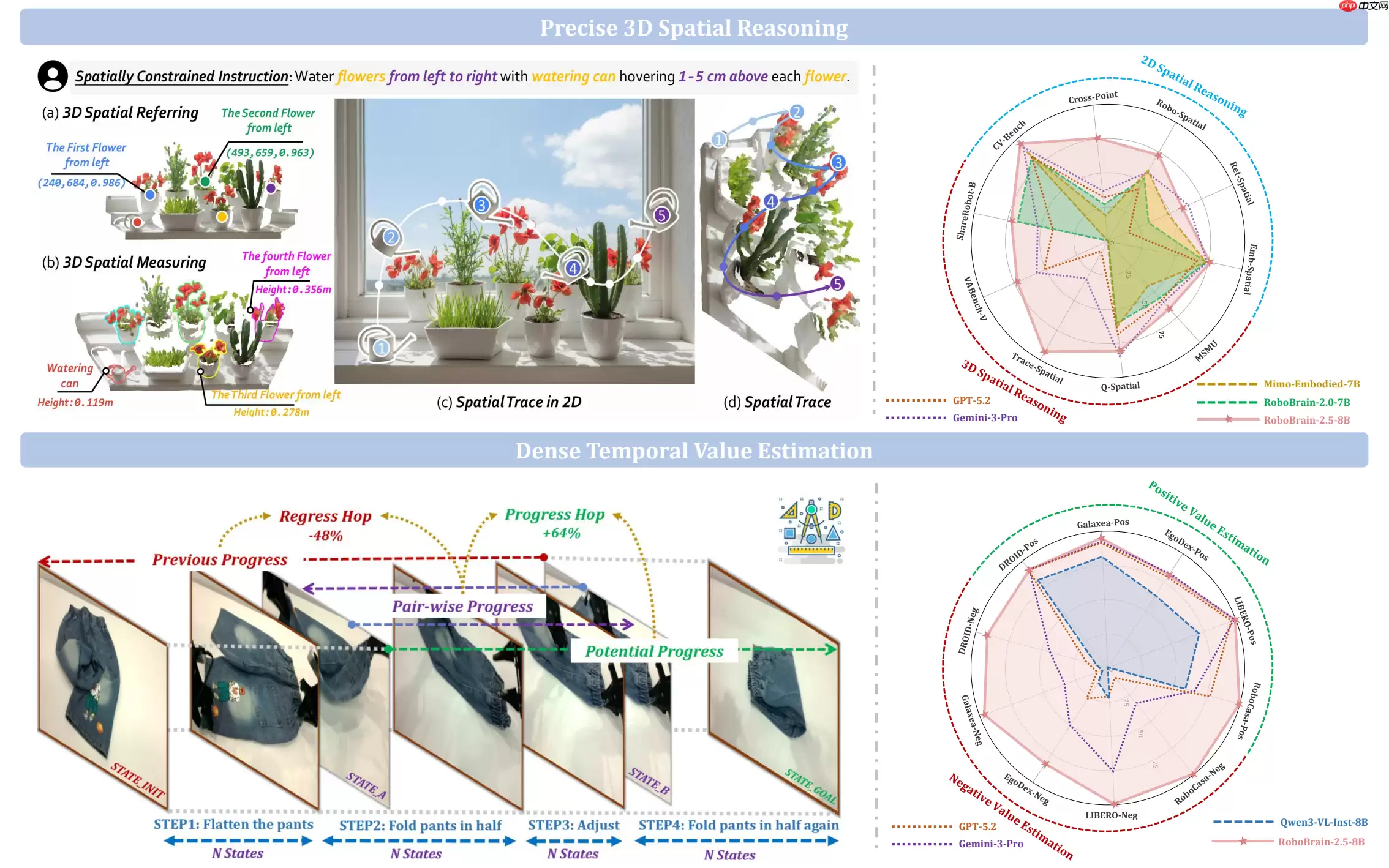
作为RoboBrain系列的最新迭代版本,RoboBrain 2.5 在继承原有通用感知理解、三维空间建模以及时序动态表征能力的基础上,进一步通过更海量、更高质量的时空对齐监督数据进行强化训练,系统性升级了两大核心能力模块:Precise 3D Spatial Reasoning(精准3D空间推理) 与 Dense Temporal Value Estimation(密集时序价值预测)。这使得机器人不仅能够理解任务语义,更能严格遵循物理规律、实时响应过程反馈,确保任务“落得实、执行准、运行稳”,推动具身智能从“看得懂、说得清”,迈向“动得准、控得稳、靠得住”。
目前,RoboBrain2.5 已在多个空间推理与时序价值建模标准评测任务中刷新SOTA性能纪录,为具身智能走向实际部署、闭环控制与规模化应用提供了坚实技术底座。
获取方式:
项目主页链接
技术报告链接
GitHub 仓库链接
模型权重链接
多芯片适配版本链接




