3D全息场景重建技术在自主导航、环境监测以及计算机视觉等众多关键领域中发挥着不可或缺的核心作用。过往,实现3D全息场景重建的技术方案通常涵盖RGB-D传感器获取发射率成像、立体成像或全波形激光雷达3D全息成像等多种路径。为此,微云全息(NASDAQ:HOLO)创新性地提出了单光子激光雷达技术方案。其采用的激光光源虽功率较低,却具备极高的灵敏度,能够在散射严重的水下环境以及极端大雾条件下,实现高分辨率三维全息图像的高质量重建。
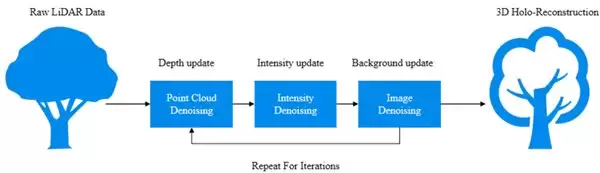
近年来,尽管3D全息激光雷达点云成像技术不断取得突破,但现有的计算成像算法仍面临诸多瓶颈,例如运算速度缓慢、成像精度不足,或过度依赖超高算力支持。即便基于卷积神经网络(CNN)来估计场景深度的前沿算法,经过训练后也难以满足实时性的严苛要求。针对这些技术难题,微云全息研发出一套全新的算法架构。该算法运用先进的点云去噪工具,将目标表面精准建模为嵌入3D空间中的二维流形。它不仅能够整合观测模型中的各类干扰信息,像泊松噪声、坏点像素、压缩传感等,还结合了计算机图形学中的流形建模工具,通过选用大规模并行降噪器,实现每秒处理数十帧数据,极大地提升了运算效率。其基于单光子激光雷达的算法,主要包含深度更新、强度更新和背景更新三个核心步骤。
在深度更新环节,微云全息运用点集曲面算法对深度变量与点云进行去噪处理,并在三维全息空间坐标系中运作。通过内核控制,对光滑连续曲面进行适配拟合。与传统深度图像降噪不同,微云全息的点云降噪不受激光雷达系统像素格式限制,可处理每个像素中任意数量的表面点,并且对所有3D点进行并行处理,运算时间大幅缩短。
在强度更新时,微云全息针对3D全息空间中单个像素坐标采取渐变步骤来降噪,仅考虑同一表面内点之间的相关性,对每个点使用最近邻低通滤波器。该步骤仅关注局部相关性,所有点并行处理。去噪完成后,去除强度低于给定阈值(即最小允许反射率)的点。
背景更新则依据激光雷达系统特性而定。在双基光栅扫描系统中,由于激光源和单光子探测器不同轴,背景计数在空间上不一定相关,此时降噪操作相对简易;而在单站光栅扫描系统和激光雷达阵列中,背景检测类似于被动成像,采用空间规律化手段结合低计算复杂度的现成图像去噪算法,能够有效改进估计值。
微云全息(NASDAQ:HOLO)构建的全新计算框架,基于单光子数据实现了实时三维全息场景重建。通过融合统计模型与计算机图形学领域高度可扩展的计算工具,能在极短时间内完成复杂户外场景的3D重建。该方法可处理每个像素中未知数量的表面点,实现复杂场景中的目标检测与成像,为复杂移动场景下稳定的实时目标重建提供了有力支撑,为3D全息成像应用的视频速率单光子激光雷达技术发展奠定了坚实基础,有望引领全息感知技术迈向新的应用高度。




