不少国内新能源车企在宣传自家辅助驾驶功能时,往往喜欢强调累计开启里程这个数字。虽然动辄数亿公里的数据看起来很亮眼,但行业内其实更看中另一个关键指标——实现零人工干预的最长连续行驶里程。
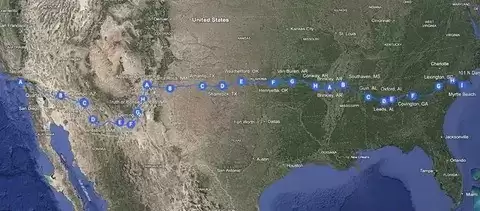
近日,特斯拉就完成了一项令人瞩目的挑战:一辆电动车从美国西海岸的洛杉矶出发,横穿整个北美大陆抵达东海岸的南卡罗来纳州,全程耗时两天零二十小时,行驶总距离达到4397公里,在没有任何人工干预的情况下,实现了全程“零接管”。
这个距离如果换算到中国的地理环境中,大致相当于从上海一路向西直达新疆喀什,途中跨越多个气候带与复杂地形。对于了解智能驾驶发展脉络的用户而言,这项成就背后的技术含量显然不言而喻。
首先,虽然行程主要路段为高速公路,路况相对简单,但对自动驾驶系统每次面临的一个额外挑战是充电环节。车辆在每次需要补充电量时,必须自主驶离高速,前往超级充电站。这段从匝道到充电站的短途行驶,需要应对复杂的城市道路、交叉路口和动态交通状况,对系统的环境感知与实时决策能力提出了更高要求。
其次,行程横跨整个美国,涉及长途连续运行和多段复杂路径的自主规划。系统必须实时计算电量消耗、预判最佳充电时机、选择最优的驶出路口,并在突发情况下启用备用充电方案。所有这些复杂的操作均由车辆系统自主完成,全程无需任何人为介入。
最终,这辆电动车顺利抵达终点,成功完成了这场极具里程碑意义的远程挑战。
值得一提的是,这项挑战的构想其实源于八年前。早在2016年,就有特斯拉技术人员提出了实现跨美国大陆级别完全自动驾驶的构想。在当时看来,这个目标似乎遥不可及。如今,历经多年的技术迭代与持续优化,这个看似不可能的挑战终于成为了现实。
回顾八年前,当时许多车企尚处于基础驾驶辅助功能的研发阶段,甚至还未完全掌握车道保持等核心技术。而这一前瞻性目标的提出,无疑展现了特斯拉在技术视野上的超前布局。
反观当下,一些国内品牌热衷于宣称在辅助驾驶领域已经“超越”或“碾压”行业先进水平,实则可能在功能完整性与实际道路表现上仍有差距。某些车型在国内市场所演示的能力,或许并未完全反映出其在全球范围内的真实技术水准。真正的技术较量,最终仍需回到极限场景下的系统稳定性与自主决策能力上来衡量。




