11月29日最新消息显示,小米汽车团队在计算机视觉领域顶级会议ICCV 2025的RealADSim挑战赛中表现卓越。在"外推新视角合成"赛道上,他们力压全球18支顶尖团队,成功摘得冠军桂冠。
作为全球计算机视觉领域的学术盛会,ICCV每两年举办一次。本届RealADSim挑战赛聚焦自动驾驶仿真等前沿技术,吸引了业内众多优秀团队参与。

本次赛事针对自动驾驶算法验证的核心难题设置了赛题:传统仿真工具往往与真实路况存在较大差距,或难以支持闭环交互。而新视角合成技术虽然能够构建4D交互环境,但在视角外推时却面临着真实感与几何一致性的技术挑战。
小米汽车团队以3D高斯溅射(3DGS)为技术基础,创新性地设计了四阶段处理流程:通过视觉衍生"伪点云"实现无激激光雷达点云初始化,有效规避了局部最优问题。
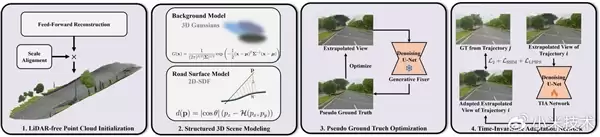
研究团队还采用2D-SDF路面模型嵌入几何先验,确保外推视角的几何一致性;引入"伪真值"监督修复外推瑕疵;借时序不变适应网络消除光照等时间相关干扰。
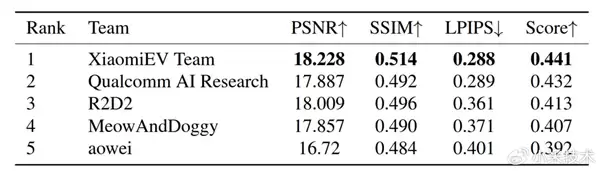
实验数据显示,小米团队以PSNR 18.228、SSIM 0.514、LPIPS 0.288的优异表现领先其他参赛队伍,特别是在无激激光雷达条件下实现了精准建模,为自动驾驶高保真仿真提供了新的技术路径。