机器狗轻松搬起轮胎,"五条腿"协同发威!

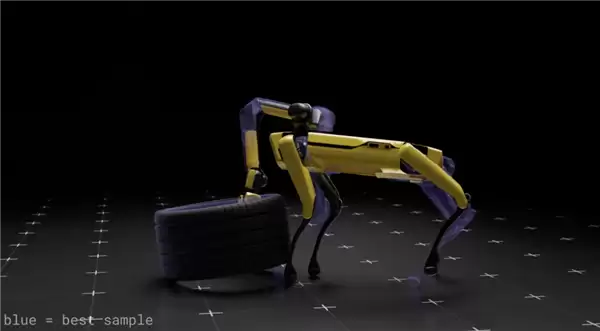
波士顿动力人工智能研究所推出的创新方法——融合采样与学习的动态全身操作技术,让机器狗Spot仅用3.7秒就能撬动轮胎。
这个重达15公斤的轮胎,相当于Spot自身体重的一半(32.7千克),远远超出了它的最大臂力极限。
更令人惊叹的是,Spot在抬起轮胎后还能精准地将其滚动至指定位置。

它甚至能将一个轮胎叠到另一个轮胎上方(还会用头部帮忙顶一下)。

这项技术突破了传统操作策略(如摇杆控制)在不同机器人形态学结构上的迁移限制,通过分层控制实现了机器狗四肢与全身的协调动力操作。
网友调侃道:这狗子怕不是要去回收站打工搬轮胎吧!
究竟是如何实现这种灵活操作的呢?
融合采样与学习的动态全身操作
简而言之,融合采样与学习的动态全身操作(Combining Sampling and Learning for Dynamic Whole-Body Manipulation)采用强化学习与基于采样的控制相结合的方式,使机器人能够执行需要手臂、双腿和躯干协同配合的动态交互任务。
为应对复杂的操作场景,研究团队采用分层控制架构,将控制问题划分为两个互补且同步的层级。
在底层控制中,基于强化学习的运动策略直接控制电机力矩,以维持平衡稳定性与运动执行力。
高层控制则根据任务类型采用不同策略:
对于轮胎扶正、拖拽与堆叠等任务,系统采用基于采样的控制方法,通过模拟潜在未来情境来发现最优操作策略。而对于轮胎滚动任务,则运用强化学习来捕捉维持物体稳定运动所需的细微动力学特征与响应机制。
所有的高层控制最终都会输出包含底盘速度、姿态参数(滚转、俯仰、高度)、腿部控制以及手臂动作等指令。
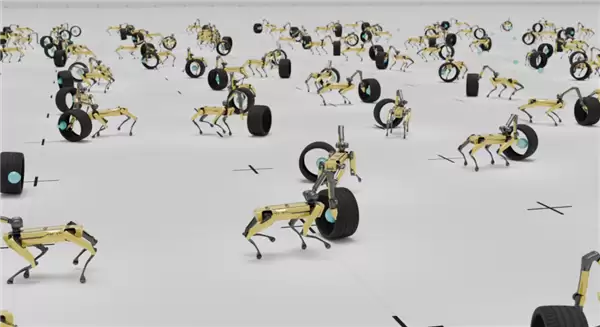
在采样控制过程中,控制器通过并行模拟多个未来情境,寻找最有效的操作策略,从而选择最能实现任务目标的动作。
对于那些需要精准施力和多接触协调的任务,系统会运行32个并行CPU线程,每个线程使用MuJoCo模拟未来几秒内的不同动作序列。
与直接采样原始轨迹不同,研究团队在样条曲线空间中进行采样,这种方式能生成更平滑、更自然的运动轨迹,同时显著降低搜索空间的维度。
该控制器展现出源于物理仿真的智能行为。在轮胎扶正过程中,控制器自主发现了复杂的操作策略:机器人通过协调Spot机械臂与前腿动作,产生足够的杠杆力以抬起沉重的轮胎。
为适应多样的初始构型,机器人可能灵活运用手臂、前腿、身体等部位的组合来调整操作策略。
值得注意的是,系统并未预设任何固定的操作模式。这种多肢体、多接触的智能行为,是在采样过程中自然涌现的结果,而非通过显式编程设定接触顺序实现的。
此外,控制器会根据实验空间中机器人与轮胎的当前构型进行动态策略调整。
在具体的强化学习策略方面,研究通过PPO算法在IsaacLab中训练得到运动策略。
这种策略为高层控制提供了稳健的底层控制抽象,能够在多种操作场景中保持平衡,从而使高层控制问题更易处理。
在轮胎滚动任务中,研究利用强化学习来应对难以精确建模的复杂摩擦与接触动力学。
其采用非对称执行者-评论者架构方法,在单块GPU上经过约24小时训练,得到高层技能策略。
该策略接收的观测状态包含机器人、轮胎与目标之间的相对姿态,以及关节位置与速度。奖励函数则根据物体几何形状及其与环境的相互关系,计算机体躯干与末端执行器的期望位置,引导策略学习达到目标姿态。

训练得到的轮胎滚动策略使机器人能够动态调整其躯干与Spot Arm的位置,以稳定控制滚动的轮胎,防止其倾倒,并将其引导至目标位置。
最后,为解决从仿真到现实的差距,训练过程中引入了随机化,包括对物体的质量、摩擦系数与形状等属性进行随机变化。
实测表现
正如我们开头提到的,在轮胎扶正任务中,机器人的最佳成绩为3.7秒,平均每个轮胎用时5.9秒,几乎达到了人类在该任务中的操作速度。

这一表现远超传统的静态平衡假设。
在静态平衡假设下,机器人操作物体时速度很慢,加速产生的惯性被忽略,关节驱动力矩主要依赖静态平衡。
而在这项研究中,机器狗能够高效搬运重达15千克的轮胎——远超其夹持器的峰值能力(11千克)和持续能力(5千克)。
这说明机器人通过动态协调全身动作,将运动与操作紧密结合,拓展了操作范围,超越了传统的拾取与放置方式。
此外,研究表明,将高层控制与底层控制分离能够显著简化控制问题。
高层控制器无需在拥有数十个自由度的系统中推理关节力矩、接触力以及稳定性约束,而是仅在一个简化动作空间中工作,该空间由底盘速度和姿态参数构成,其将执行细节交由运动控制器处理,从而极大降低了复杂度。
分层控制架构使得高层控制器能够专注于任务完成,而无需显式地推理平衡约束或地面接触。
由此,学习得到的运动抽象层让高层控制更简单、计算更可行,控制器只需专注于"在哪里"和"如何操作物体",无需处理复杂的底层动力学细节。
文章出处:量子位




